ПОДВОДНЫЙ ДАТЧИК КОРМА
1Петрозаводский государственный университет, магистр приборостроения
2Петрозаводский государственный университет, директор Центра коллективного пользования научным оборудованием
3Петрозаводский государственный университет, магистр приборостроения
Аннотация
Данная статья посвящена описанию разработанного подводного датчика корма на основе анализа изображения. Применяемый метод регистрации корма позволяет повысить эффективность систем автоматического и ручного кормления рыбы.
Ключевые слова: анализ видеоизображения, датчик, корм, рыбное хозяйство, светодиодная подсветка, устройство видеоанализа
Рубрика: 05.00.00 ТЕХНИЧЕСКИЕ НАУКИ
Библиографическая ссылка на статью:
Вакуленко О.А., Семенцов А.Б., Мургашев А.Е. Подводный датчик корма // Современные научные исследования и инновации. 2017. № 10 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2017/10/84402 (дата обращения: 30.07.2026).
В настоящее время на рыбоводных хозяйствах активно развивается автоматизация процесса выращивания рыбы. При этом активно используются различные системы пневматической выброски корма, которые устанавливаются на берегу (или на плавучей станции), в непосредственной близости от садка, либо непосредственно в самом садке (рисунок 1).
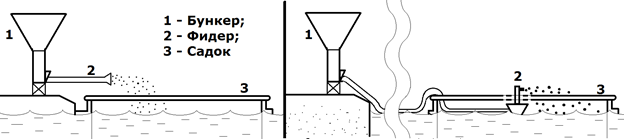
а) б)
Рисунок 1. Схема расположения система выброски корма (а – на берегу (плавучей станции); б – в садке).
При активном использовании рыбоводными хозяйствами пневматических систем выброски корма, контроля над потреблением корма практически не осуществляется. В основном, выброска корма осуществляется порциями, где порция рассчитывается либо по времени выброски, либо по массе корма, которая должно быть выброшена в садок. Такой подход весьма неэффективен, т.к. порции всегда рассчитываются исходя из массы корма, которая должна поглотить одна рыба. Однако, разные особи рыбы в одном садке обладают разной активностью, в связи с чем, более активные особи могут съесть больше положенного объема корма. Исходя из этого, объем корма, положенный одному садку, берется с запасом, чтобы менее активные особи также смогли насытиться.
Объем потребляемого рыбой корма зависит от множества факторов. Это и температура воды, и атмосферное давление, и многое другое. В подавляющем большинстве случаев, объем корма, выброшенного в садок, сильно превышает объем корма, который был реально потреблен рыбой. На крупных рыбоводных хозяйствах (имеющих не менее 20 садков для выращивания рыбы), осуществляющих кормление 2 раза в день, масса выбрасываемого впустую корма превышает 200 кг в день. Это приводит к крупным финансовым затратам на корм и к сильному загрязнению водоемов.
Системы контроля выброски корма на территории Российской Федерации практически не используется. Связано это с тем, что в мире существует всего несколько компаний, производящих подобные системы (например, норвежская компания «AKVA group» [1]). При этом, системы контроля выброски корма от данных производителей могут использоваться лишь совместно с системами выброски корма от этих же производителей. Так же сказывается высокая стоимость одного датчика (например, цена подводного датчика «Doppler Pellet Sensor» от компании «AKVA group» составляет ~3000 евро).
Несмотря на быстрый рост хозяйств, использующих автоматизацию в процессе выращивания рыбы, все еще существует достаточно большое количество малых хозяйств или хозяйств по выращиванию мальков, которые используют ручной метод кормления. На таких хозяйствах невозможно применение систем контроля корма, предлагаемых существующими производителями.
Так же, наличие на рынке лишь зарубежных компаний означает долгие сроки и высокую стоимость ремонта оборудования, в случае его поломки. Из опыта форелеводческих хозяйств следует, что среднее время починки оборудования составляет 6 месяцев. Это весьма длительный срок, потому как период кормления рыбы в северных регионах не превышает 8 месяцев (начинается в конце марта – начале апреля, после схода льда и заканчивается в конце октября, с приходом сильных заморозков).
Идея разработанного подводного датчика контроля выброски корма основывается на анализе двумерного изображения, поступающего с видеокамеры.
При превышении установленного числа одновременно находящихся в кадре гранул корма или при превышении пропускания предельного количества корма на единицу времени, на поверхность отсылается сигнал об окончании процесса кормления. Данный сигнал поступает с одного из программируемых портов расширения устройства видеоанализа и попадает на реле, которое в свою очередь замыкает контакт, для включения сигнального фонаря, либо же реле будет встроено непосредственно в систему выброски корма и будет осуществлять размыкание цепи, для немедленного прекращения процесса кормления.
Конструкция датчика контроля выброски корма состоит из следующих частей (рисунок 2):
-
светодиодная подсветка;
-
видеокамера;
-
устройство обработки видеоизображения;
-
водонепроницаемый корпус, содержащий камеру и устройство видеоанализа;
-
преобразователи напряжения с 24В на 12В и на 5В.
-
воронка для сбора корма.
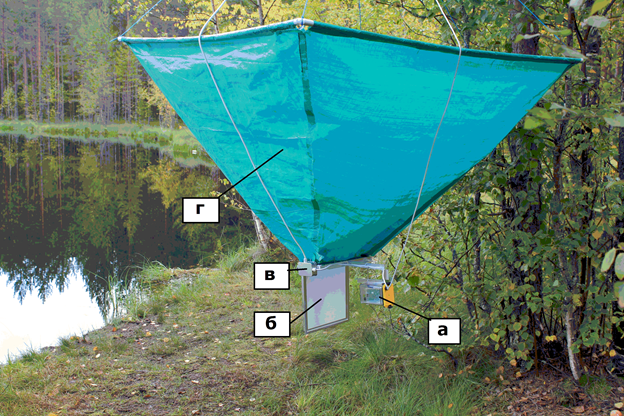
Рисунок 2. Внешний вид датчика (а – устройство видеоанализа; б – светодиодная подсветка; в – корпус с преобразователями напряжения; г – воронка для сбора корма).
В качестве устройства обработки видеоизображения был выбран одноплатный компьютер «Raspberry Pi 2 model B+» (рисунок 3) [2]. Данное устройство было выбрано в связи с тем, что оно удовлетворяет необходимым требованиям, выставленных на этапе разработки датчика, а именно:
-
вычислительная мощность 175 MFlops. Было рассчитано, что для корректной работы датчика, частота обработки кадров разрешением 800х600px, должна быть как минимум 1 кадр/с, для чего требуется ~0.5 MFlops;
-
возможность подключения видеокамеры;
-
наличие портов для вывода изображения (Ethernet, A/V);
-
наличие программируемых портов расширения, для вывода сигнала окончания кормления и иных вспомогательных действий;
-
низкое энергопотребление (для питания устройства требуется напряжение 5В и минимальная сила тока 0.2А);
-
компактный размер (85х55 мм)
-
низкая стоимость.
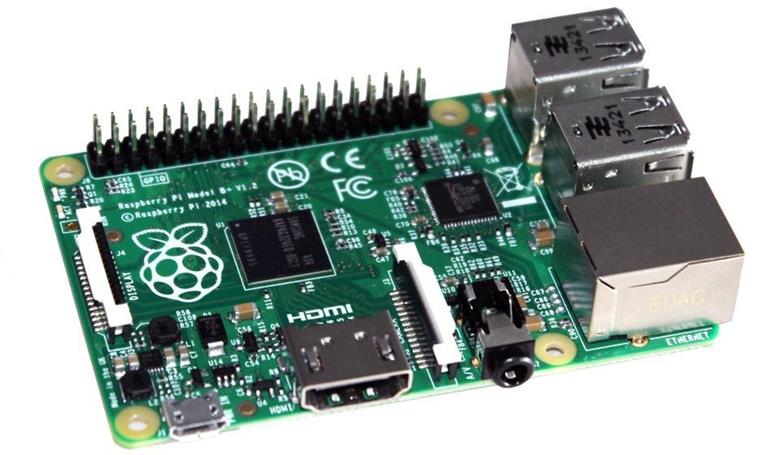
Рисунок 3. Внешний вид «Raspberry Pi 2 Model B+».
В процессе разработки датчика, были произведены расчеты необходимых параметров для будущей видеокамеры и объектива, а именно:
-
формат изображения 4:3;
-
фокусное расстояние 2.9-5.25мм;
-
угол обзора 72-940;
-
размер матрицы 1/2”-1/4”;
-
тип матрицы CCD;
-
разрешение должно позволять распознавать корм, минимальной фракцией 1 мм (было рассчитано, что для детектирования 1 гранулы корма фракцией 1 мм на расстоянии 240 мм достаточно разрешения 800х600px, выбранная видеокамера имеет максимальное разрешение 1920х1080px);
-
компактный размер, поскольку камера должна находиться в корпусе, совместно с устройством видеоанализа;
-
низкое энергопотребление (до 5В);
-
низкая стоимость.
Всем вышеперечисленным требованиям удовлетворяла видеокамера «RPI Camera F» (рисунок 4), от того же производителя, что и выбранное устройство видеоанализа.

Рисунок 4. Внешний вид камеры «RPI Camera F».
В качестве корпуса для камеры и устройства видеоанализа используется готовый корпус «CameraShield CSC-100» (рисунок 5). Данный корпус изготовлен в соответствии с системой классификации степени защиты оболочки и соответствует стандарту IP68 по данной системе. По заявлениям производителя, возможно использования данного корпуса на глубине до 30 метров.

Рисунок 5. Внешний вид подводного бокса «CameraShield CSC-100».
Светодиодная подсветка состоит из водонепроницаемой диодной ленты стандарта IP68 и светорассеивающей пластины. Данная конструкция удобна тем, что в подсветке не имеется воздушных пустот, в связи с чем, не требуется применения дополнительных грузов, для ее погружения. Так же, использование светодиодной ленты, вместо светодиодной матрицы, покрывающей всю поверхность рассеивающей пластины, значительно уменьшает потребляемую мощность устройства.
Светодиодная подсветка и устройство видеоанализа требуют различное напряжение для питания (12В и 5В соответственно). К датчику подводится напряжение 24В, поскольку при таком уровне можно передать питание на дальнее расстояние, чем при подаче меньшего напряжения. Использование большего напряжения запрещено на водных объектах из соображений безопасности. В связи с этим, было разработано и собрано два преобразователя напряжения на основе понижающего преобразователя «MP2307»[3], с 24В до 12В для светодиодной подсветки и с 24В до 5В для устройства видеоанализа (рисунок 6). Печатные платы для обоих преобразователей идентичны и различаются лишь номиналами резисторов делителя напряжения R3-R4. Данные преобразователи располагаются в корпусе, залитом компаундом, который крепится непосредственно на датчик.
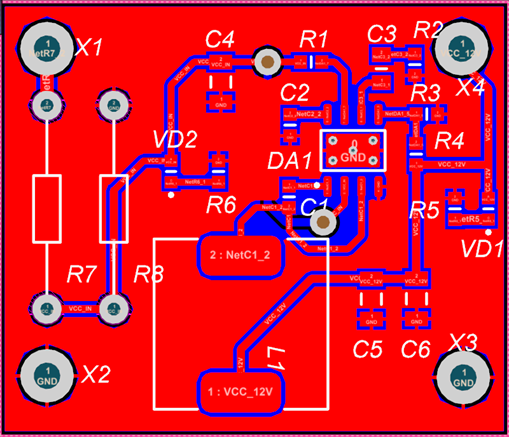
Рисунок 6. Внешний вид печатной платы одного из преобразователей напряжения.
Воронка для сбора корма имеет вид усеченной пирамиды. Такая форма была выбрана для тестового образца, поскольку ее проще изготовить. Воронка имеет высоту 100 см, размеры верхнего основания составляют 120х120 см, размер нижнего основания составляет 10х24 см. Форма и размеры воронки для сбора корма не являются принципиальными (за исключением размеров нижнего основания) и в дальнейшем возможно изготовление воронки иных форм и размеров.
Для обработки кадров был написан программный код, реализующий следующий алгоритм:
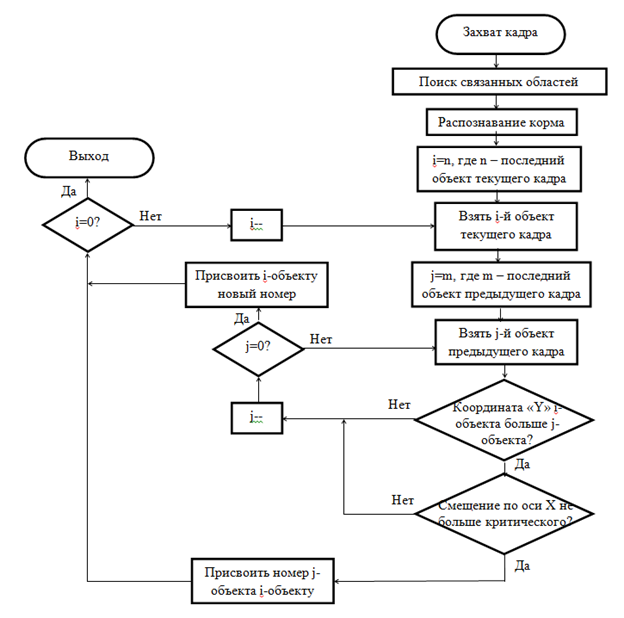
Рисунок 7. Алгоритм распознавания корма.
Здесь, при поиске связанных областей происходит выделение пикселей по яркости и объединение ближайших соседей в один объект. При распознавании корма производятся проверка полученных объектов в кадре на соотношение сторон и корректность площадей.
Пример выделения корма различных фракций на изображении представлен на рисунке 8.
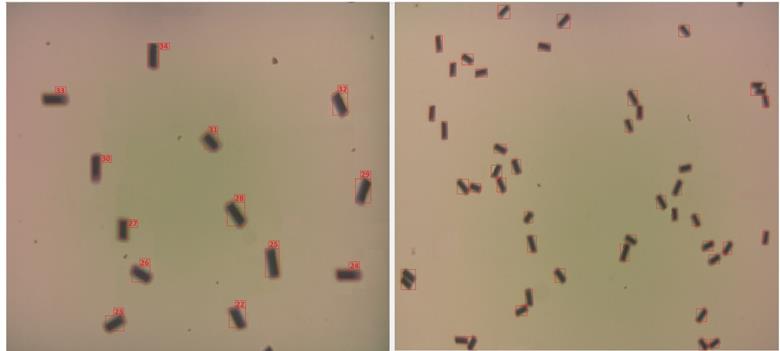
а) б)
Рисунок 8. Выделение корма на изображении (а – корм фракцией 5 мм; б – корм фракцией 2 мм).
Как видно, на кадрах выделяются лишь гранулы корма. Выделение мелких объектов, которые так же попали в кадр, не происходит.
Для мониторинга основной программы на предмет зависаний, была реализована вспомогательная программа, являющаяся программным сторожевым таймером. Для случая зависания самого устройства видеоанализа, в нем присутствует аппаратный сторожевой таймер.
Тестирование датчика корма проводилось на озере Ушкозеро. Датчик был погружен на глубину около 6 метров, при этом, изображение с камеры, уже после обработки, передавалось на поверхность. Для индикации превышения количества гранул корма в кадре, на экран дополнительно был выведен индикатор, который загорается зеленым цветом при срабатывании датчика (рисунок 9). Для тестирования использовался корм различных фракций (от 1 до 5 мм).

Рисунок 9. Процесс тестирования.
Библиографический список
- AKVA group [Электронный ресурс] – Режим доступа: http://www.akvagroup.com/, свободный. – Загл. с экрана.
- Raspberry Pi2 Model B+ [Электронный ресурс] – Режим доступа: https://lib.chipdip.ru/078/DOC001078539.pdf. – Загл. с экрана.
- Step-Down Converter MP2307 [Электронный ресурс] – Режим доступа: https://cdn-shop.adafruit.com/datasheets/MP2307_r1.9.pdf. – Загл. с экрана.
Все статьи автора «Вакуленко Олег Анатольевич»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.