

Робототехника в современном мире получила большое развитие. Чуть ли не каждую неделю в ней совершаются новые прорывы. Основной задачей робота является упрощение жизни людей. Роботы работают в различных экстремальных условиях, исследуют планеты Солнечной системы и задействованы в большинстве других процессов.
Для того чтобы роботы могли выполнять свою работу они должны получать команды. Существует несколько основных способов управления робототехникой — это проводное управление, беспроводное управление и автономная работа.
Одной из простых систем управления является проводное управление [1]. Управление происходит как с помощью платформы с тумблерами, так и с помощью кнопки, джойстика, пульта которые соединяются с устройством при помощи кабеля. Как известно на устройствах с подобным управлением не ставят искусственный интеллект или сложно-программируемые системы.
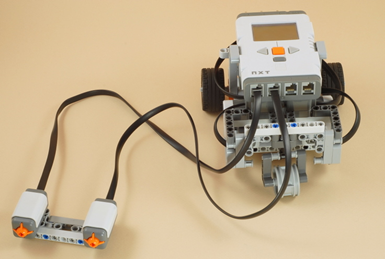
Рис.1. Управление роботом проводным способом
Также к такому виду управления можно отнести компьютерное проводное управление или же управление посредством Ethernet.
Помимо проводных систем управления существуют и системы беспроводного управления. Такие системы имеют большую разновидность, и они имеют больше различных возможностей, чем при использовании предыдущего типа управления.
К таким системам относят: инфракрасный сигнал, управление по радиоканалу, Bluetooth и Wi-Fi. Из данных систем самой простой является управление с помощью инфракрасного сигнала, так же она считается устаревшей. Для управления роботом используется пульт с инфракрасным излучателем, а на робота устанавливается ИК-датчик, который подключается к микроконтроллеру для передачи сигналов [2].

Рис.2. Дистанционное управление роботом
Наиболее часто встречается система управления при помощи радиоканала. Для гарантированной передачи данных между устройствами применяются различные протоколы передачи информации. Одним из таких является протокол ZigBee.
ZigBee — высокоуровневый протокол беспроводной связи, который применяется массово при автоматизации промышленного оборудования, в системах автоматизации зданий и жилых помещений, в медицинском и телекоммуникационном оборудовании.
Самым популярным способом управления является управление с помощью Bluetooth. Несмотря на ограниченный радиус действия, Bluetooth пользуется большим спросом у людей, увлекающихся робототехникой.
Более сложной системой является управление по Wi-Fi. Радиус действия значительно больше все остальных беспроводных систем. Да и управлять роботом можно находясь на достаточно приличном расстоянии.
Высшим уровнем в управлении робототехникой является автономное управление – это когда устройство способно самостоятельно без вмешательства человека продумывать и передвигаться по запланированному маршруту. Такой способ возможен благодаря запрограммированному микроконтроллеру. Данный вариант управления широко применяется как в астрономии, так и для домашнего применения (роботы-пылесосы [3], роботы для мойки окон, роботы для бассейна, роботы-газонокосилки и т.д.).

Рис.3. Робот-пылесос
Стремление людей упросить себе жизнь толкает на создание новых роботов и роботизированной техники. Это, в свою очередь, заставляет усовершенствовать комплексы систем управления. Все больше используется беспроводное и автономное управление. Эти системы упрощают обращение с роботизированной техникой.
Библиографический список
- Проводное управление роботами: [Электронный ресурс]. URL: http://vex.examen-technolab.ru/lessons/unit_3_introduction_to_vexnet/51/ (Дата обращения: 03.08.2016).
- Протокол ZigBee: [Электронный ресурс]. URL: http://robotgeeks.ru/blogs/lessons/bioloid-stem-besprovodnoe-upravlenie-robotami-s-pomoschyu-zigbee (Дата обращения 04.08.2016).
- Обзор технологии Wi-Fi: [Электронный ресурс]. URL: https://ru.wikipedia.org/wiki/Wi-Fi (Дата обращения 01.08.2016).
Количество просмотров публикации: Please wait