СПОСОБЫ УПРАВЛЕНИЯ МЕХАНОТРОННЫМИ СИСТЕМАМИ
1Брянский Государственный университет имени академика И.Г. Петровского, бакалавр
2Брянский Государственный университет имени академика И.Г. Петровского, магистрант
Аннотация
В данной статье рассматривается процесс развития робототехники, способы управления и внедрения роботов в современную жизнь человека.
Ключевые слова: механотронные системы, робототехника
WAYS TO CONTROL MECHATRONIC SYSTEMS
1Bryansk State University named after academician I. G. Petrovsky, bachelor
2Bryansk State University named after academician I. G. Petrovsky, undergraduate
Abstract
This article describes the process of development of robotics, control methods and the introduction of robots in modern human life.
Keywords: robotics, vacuum tube systems
Рубрика: 05.00.00 ТЕХНИЧЕСКИЕ НАУКИ
Библиографическая ссылка на статью:
Подсоломко Д.Ю., Шевченко А.А. Способы управления механотронными системами // Современные научные исследования и инновации. 2016. № 8 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2016/08/70365 (дата обращения: 30.07.2026).
Робототехника в современном мире получила большое развитие. Чуть ли не каждую неделю в ней совершаются новые прорывы. Основной задачей робота является упрощение жизни людей. Роботы работают в различных экстремальных условиях, исследуют планеты Солнечной системы и задействованы в большинстве других процессов.
Для того чтобы роботы могли выполнять свою работу они должны получать команды. Существует несколько основных способов управления робототехникой — это проводное управление, беспроводное управление и автономная работа.
Одной из простых систем управления является проводное управление [1]. Управление происходит как с помощью платформы с тумблерами, так и с помощью кнопки, джойстика, пульта которые соединяются с устройством при помощи кабеля. Как известно на устройствах с подобным управлением не ставят искусственный интеллект или сложно-программируемые системы.
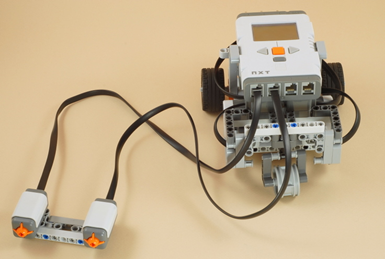
Рис.1. Управление роботом проводным способом
Также к такому виду управления можно отнести компьютерное проводное управление или же управление посредством Ethernet.
Помимо проводных систем управления существуют и системы беспроводного управления. Такие системы имеют большую разновидность, и они имеют больше различных возможностей, чем при использовании предыдущего типа управления.
К таким системам относят: инфракрасный сигнал, управление по радиоканалу, Bluetooth и Wi-Fi. Из данных систем самой простой является управление с помощью инфракрасного сигнала, так же она считается устаревшей. Для управления роботом используется пульт с инфракрасным излучателем, а на робота устанавливается ИК-датчик, который подключается к микроконтроллеру для передачи сигналов [2].

Рис.2. Дистанционное управление роботом
Наиболее часто встречается система управления при помощи радиоканала. Для гарантированной передачи данных между устройствами применяются различные протоколы передачи информации. Одним из таких является протокол ZigBee.
ZigBee — высокоуровневый протокол беспроводной связи, который применяется массово при автоматизации промышленного оборудования, в системах автоматизации зданий и жилых помещений, в медицинском и телекоммуникационном оборудовании.
Самым популярным способом управления является управление с помощью Bluetooth. Несмотря на ограниченный радиус действия, Bluetooth пользуется большим спросом у людей, увлекающихся робототехникой.
Более сложной системой является управление по Wi-Fi. Радиус действия значительно больше все остальных беспроводных систем. Да и управлять роботом можно находясь на достаточно приличном расстоянии.
Высшим уровнем в управлении робототехникой является автономное управление – это когда устройство способно самостоятельно без вмешательства человека продумывать и передвигаться по запланированному маршруту. Такой способ возможен благодаря запрограммированному микроконтроллеру. Данный вариант управления широко применяется как в астрономии, так и для домашнего применения (роботы-пылесосы [3], роботы для мойки окон, роботы для бассейна, роботы-газонокосилки и т.д.).

Рис.3. Робот-пылесос
Стремление людей упросить себе жизнь толкает на создание новых роботов и роботизированной техники. Это, в свою очередь, заставляет усовершенствовать комплексы систем управления. Все больше используется беспроводное и автономное управление. Эти системы упрощают обращение с роботизированной техникой.
Библиографический список
- Проводное управление роботами: [Электронный ресурс]. URL: http://vex.examen-technolab.ru/lessons/unit_3_introduction_to_vexnet/51/ (Дата обращения: 03.08.2016).
- Протокол ZigBee: [Электронный ресурс]. URL: http://robotgeeks.ru/blogs/lessons/bioloid-stem-besprovodnoe-upravlenie-robotami-s-pomoschyu-zigbee (Дата обращения 04.08.2016).
- Обзор технологии Wi-Fi: [Электронный ресурс]. URL: https://ru.wikipedia.org/wiki/Wi-Fi (Дата обращения 01.08.2016).
Все статьи автора «Подсоломко Дмитрий Юрьевич»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.