В настоящей работе предлагается сравнительная характеристика ПИ регулятора с корректирующей обратной связью (КОС) [1, c. 136] и многопараметрического регулятора ПИДД2 [2, c. 34] при работе в системах стабилизации, как наиболее распространенных в промышленности. Интерес вызывает оценка таких параметров, как точность и показатели переходного процесса (перерегулирование, время вхождения в трубку ±5% относительно установившегося режима) без помех и при их присутствии во входном сигнале.
Для корректного сравнения указанные регуляторы рассматривались в качестве управляющего устройства (УУ) для объекта, использованного в работе [2, c. 36], модель которого представлена следующей передаточной функцией:
 (1)
(1)
с параметрами: Koy=0,37, Toy=91,8c, T=55,8c, μ=2, τoy=12c.
Если в (1) звено запаздывания заменить набором инерционных минимально фазовых звеньев [3, c. 217]
 ,
,
то выражение (1) примет вид:
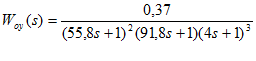 .
.
В результате модель замкнутой системы с УУ в виде ПИ регулятора с КОС будет выглядеть так, как показано на рис. 1 (схема 2).
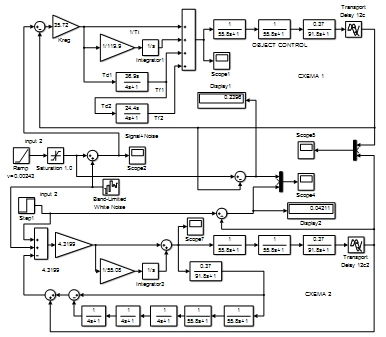
Рисунок 1 – Модель замкнутой системы с УУ: 1-я схема с ПИДД2, 2-я схема – ПИ с КОС
Схема 1 на этом же рисунке представляет модель системы управления с УУ в виде многопараметрического регулятора ПИДД2. Параметры последнего соответствуют значениям 4-го столбца табл. 2 [2, с. 37], а именно: Kрег=35,72, Tи=119,9с, Tф1=Tф2=4с, Tд1=36,9с, Tд2=24,4с.
При исследовании реакции каждой системы на сигнал 1(t) получили слишком большую (2400 усл.ед.) величину управления для схемы 1. Естественно сигнал выхода значительно быстрее достигал желаемого 5-ти процентного коридора по сравнению с ПИДД2 (рис. 2). На этом рисунке, помимо сигнала управления, изображены графики ошибки воспроизведения системой задания:
δ(t)=1(t)-y(t),
y(t) – выходная координата системы.
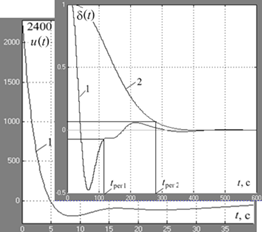
Рисунок 2 – Реакция систем на сигнал 1(t)
Схема 2 почти в 3 раза медленнее схемы 1, что объясняется небольшим значением сигнала управления (4,32 усл.ед.). Поскольку на практике на сигнал управления накладывается ограничение, обусловленное величиной допустимой мощности исполнительного блока, было решено поставить ограничитель Saturation на выходе УУ схемы 1 с ограничением до 4,32 усл.ед., чтобы обеспечить равные условия эксперимента для обеих схем.
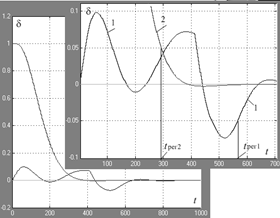
Рисунок 3 – Результаты с Saturation
Кроме того, было предложено использовать во входном сигнале блок Ramp с тем, чтобы конечное значение, равное 1, достигать постепенно с малой скоростью (на рис. 1 модель этого сигнала обозначена “input 2″). Время вхождения в 5-ти процентную трубку увеличилось в 2 раза, по сравнению со схемой 2 при 16 усл.ед. (рис. 3).
Для исследования обеих схем в условиях помех был использован Band-Limited White Noise, подключенный к регулярному сигналу, как аддитивная помеха. Как видно из рис. 4, система, имеющая УУ в виде ПИ регулятора с КОС, обладает лучшей помехоустойчивостью, т.к. погрешность за счет шума входит в трубку ±5%.
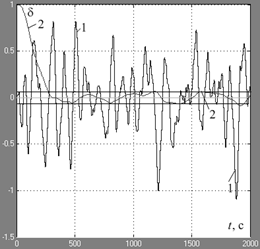
Рисунок 4 – Результаты с White Noise
В заключение хотелось бы отметить, что в промышленных системах стабилизации ПИ регулятор с КОС, как показало моделирование, лучше ПИДД2 относительно показателей качества процесса управления.
Библиографический список
-
Пьявченко Т.А. Регулятор без дифференциальной составляющей для управления сложными промышленными объектами // Известия ЮФУ. Технические науки. – 2012. – №2 (127). – С.135-141.
-
Смирнов Н.И., Сабанин В.Р., Репин А.И. Структурная реализация и оптимальная настройка многопараметрического ПИДД2 регулятора с реальным дифференцированием // Промышленные АСУ и контроллеры. – 2007. – №11 – с.34-39.
-
Пьявченко Т.А. Метод идентификации промышленного объекта по его временной и частотной характеристикам // Известия ЮФУ. Тематический выпуск «Интеллектуальные САПР». – Таганрог: Изд-во ТТИ ЮФУ, 2010. – №7 (108), – 262. С. 216 – 219.