ОЦЕНКА ПОКАЗАТЕЛЕЙ ПРОЦЕССА УПРАВЛЕНИЯ ДЛЯ РЕГУЛЯТОРОВ БЕЗ ДИФФЕРЕНЦИАЛЬНОЙ СОСТАВЛЯЮЩЕЙ И МНОГОПАРАМЕТРИЧЕСКОГО ПИДД2
1Инженерно-технологической академии Южного федерального университета, магистрант
Аннотация
В статье рассматривается модель объекта управления с настроенным многопараметрическим ПИДД2 регулятором с реальным дифференцированием. Построена модель замкнутой системы с ПИДД2 регулятором и ПИ регулятором с корректирующей обратной связью. Приведены результаты моделирования в виде графиков. Сделаны выводы по каждому этапу исследований.
Ключевые слова: корректирующая обратная связь, объект управления, перерегулирование, переходная характеристика, ПИ регулятор, ПИДД2 регулятор, установившийся режим
ASSESSING THE PERFORMANCE MANAGEMENT PROCESS FOR THE REGULATOR WITHOUT DIFFERENTIAL COMPONENT AND MULTIPARAMETRIC PIDD2
1Engineering and Technology Academy of Southern Federal University, undergraduate
Abstract
In the article is dealt the model of control object with the customized multiparametric PIDD2 controller with real differentiation. It is built the model of a closed system with PIDD2 controller and PI controller with corrective feedback. It is shown the results of the simulation in the form of graphs. It is made conclusions for each stage of research.
Keywords: control object, corrective feedback, overshoot, PI controller, PIDD2 controller, steady state, transient response
Рубрика: 05.00.00 ТЕХНИЧЕСКИЕ НАУКИ
Библиографическая ссылка на статью:
Кияшко А.В., Мола Богдан Г., Македонов Е.А. Оценка показателей процесса управления для регуляторов без дифференциальной составляющей и многопараметрического ПИДД2 // Современные научные исследования и инновации. 2014. № 12. Ч. 1 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2014/12/42227 (дата обращения: 31.07.2026).
В настоящей работе предлагается сравнительная характеристика ПИ регулятора с корректирующей обратной связью (КОС) [1, c. 136] и многопараметрического регулятора ПИДД2 [2, c. 34] при работе в системах стабилизации, как наиболее распространенных в промышленности. Интерес вызывает оценка таких параметров, как точность и показатели переходного процесса (перерегулирование, время вхождения в трубку ±5% относительно установившегося режима) без помех и при их присутствии во входном сигнале.
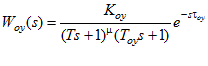
Для корректного сравнения указанные регуляторы рассматривались в качестве управляющего устройства (УУ) для объекта, использованного в работе [2, c. 36], модель которого представлена следующей передаточной функцией:
 (1)
(1)
с параметрами: Koy=0,37, Toy=91,8c, T=55,8c, μ=2, τoy=12c.
Если в (1) звено запаздывания заменить набором инерционных минимально фазовых звеньев [3, c. 217]
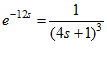 ,
,
то выражение (1) примет вид:
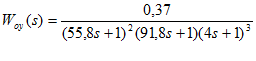 .
.
В результате модель замкнутой системы с УУ в виде ПИ регулятора с КОС будет выглядеть так, как показано на рис. 1 (схема 2).
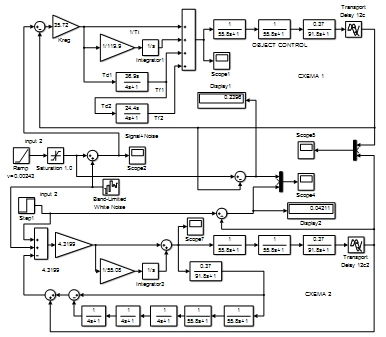
Рисунок 1 – Модель замкнутой системы с УУ: 1-я схема с ПИДД2, 2-я схема – ПИ с КОС
Схема 1 на этом же рисунке представляет модель системы управления с УУ в виде многопараметрического регулятора ПИДД2. Параметры последнего соответствуют значениям 4-го столбца табл. 2 [2, с. 37], а именно: Kрег=35,72, Tи=119,9с, Tф1=Tф2=4с, Tд1=36,9с, Tд2=24,4с.
При исследовании реакции каждой системы на сигнал 1(t) получили слишком большую (2400 усл.ед.) величину управления для схемы 1. Естественно сигнал выхода значительно быстрее достигал желаемого 5-ти процентного коридора по сравнению с ПИДД2 (рис. 2). На этом рисунке, помимо сигнала управления, изображены графики ошибки воспроизведения системой задания:
δ(t)=1(t)-y(t),
y(t) – выходная координата системы.
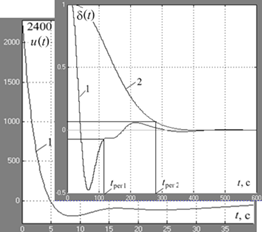
Рисунок 2 – Реакция систем на сигнал 1(t)
Схема 2 почти в 3 раза медленнее схемы 1, что объясняется небольшим значением сигнала управления (4,32 усл.ед.). Поскольку на практике на сигнал управления накладывается ограничение, обусловленное величиной допустимой мощности исполнительного блока, было решено поставить ограничитель Saturation на выходе УУ схемы 1 с ограничением до 4,32 усл.ед., чтобы обеспечить равные условия эксперимента для обеих схем.
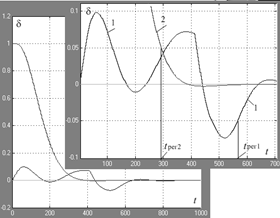
Рисунок 3 – Результаты с Saturation
Кроме того, было предложено использовать во входном сигнале блок Ramp с тем, чтобы конечное значение, равное 1, достигать постепенно с малой скоростью (на рис. 1 модель этого сигнала обозначена “input 2″). Время вхождения в 5-ти процентную трубку увеличилось в 2 раза, по сравнению со схемой 2 при 16 усл.ед. (рис. 3).
Для исследования обеих схем в условиях помех был использован Band-Limited White Noise, подключенный к регулярному сигналу, как аддитивная помеха. Как видно из рис. 4, система, имеющая УУ в виде ПИ регулятора с КОС, обладает лучшей помехоустойчивостью, т.к. погрешность за счет шума входит в трубку ±5%.
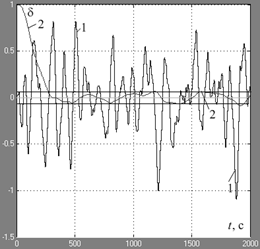
Рисунок 4 – Результаты с White Noise
В заключение хотелось бы отметить, что в промышленных системах стабилизации ПИ регулятор с КОС, как показало моделирование, лучше ПИДД2 относительно показателей качества процесса управления.
Библиографический список
-
Пьявченко Т.А. Регулятор без дифференциальной составляющей для управления сложными промышленными объектами // Известия ЮФУ. Технические науки. – 2012. – №2 (127). – С.135-141.
-
Смирнов Н.И., Сабанин В.Р., Репин А.И. Структурная реализация и оптимальная настройка многопараметрического ПИДД2 регулятора с реальным дифференцированием // Промышленные АСУ и контроллеры. – 2007. – №11 – с.34-39.
-
Пьявченко Т.А. Метод идентификации промышленного объекта по его временной и частотной характеристикам // Известия ЮФУ. Тематический выпуск «Интеллектуальные САПР». – Таганрог: Изд-во ТТИ ЮФУ, 2010. - №7 (108), – 262. С. 216 – 219.
Все статьи автора «Македонов Евгений Андреевич»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.