ОСНОВЫ УПРАВЛЕНИЯ ЭЛЕМЕНТАМИ ИНТЕЛЛЕКТУАЛЬНЫХ ТРАНСПОРТНЫХ СЕТЕЙ
Национальный аэрокосмический университет им. Н.Е. Жуковского "ХАИ"
ассистент кафедры систем управления летательными аппаратами
Аннотация
Представлен рациональный подход к управлению транспортным движением с целью его эффективной организации и минимизации пробок и потенциально опасных ситуаций. Предложен алгоритм получения актуальных параметров транспортного потока по видеоинформации в онлайн режиме. Рассмотрено решение задачи управления в условиях неопределенности по нескольким критериям.
Ключевые слова: алгоритм, безопасность движения, интеллектуальная транспортная система, рациональное управление, транспортный поток, управление
Рубрика: 05.00.00 ТЕХНИЧЕСКИЕ НАУКИ
Библиографическая ссылка на статью:
Харина Н.Н. Основы управления элементами интеллектуальных транспортных сетей // Современные научные исследования и инновации. 2020. № 6 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2020/06/92476 (дата обращения: 02.08.2026).
Введение
Безопасность движение является актуальной и острой задачей. Ежедневно из-за нарушений правил движения страдают тысячи людей. Возникшие происшествия негативно сказываются на интенсивности движения транспортного потока. В свою очередь это приводит к повышению шумового уровня, загрязнения окружающей среды и увеличения потребления природных ресурсов. Повышение безопасности на дорогах является основной задачей для интеллектуальных транспортных систем. За счет интеллектуального анализа актуальной дорожной ситуации и выбранного на его основе метода регулирования движения ИТС значительно сократит количество пробок, позволит своевременно реагировать на дорожно-транспортные происшествия и минимизировать риски их возникновения.
Частными задачами ИТС являются управление скоростью, интенсивностью и плотностью транспортных потоков, анализ актуальной ситуации и выявление аварийных ситуаций, своевременное информирование водителей о ситуации на дороге и другое. Основными методами решения этих задач является использование изменяющихся длительностей работы светофоров и дорожных знаков, планирование маршрутов движения на основе анализа актуальной ситуации, внедрение систем поддержки действий водителя.
В работе предлагается структура интеллектуальной транспортной системы для повышения безопасности дорожного движения. Работа системы основывается на видеодетектировании транспортных потоков и последующем принятии решения о типе и структуре управления.
Управление в условиях неопределенности
Известные методы управления транспортными потоками имеют один общий недостаток – работают со статичными оценками текущей ситуации на дороге. В действительности ситуация постоянно меняется, поэтому статические методы управления не дают эффективного результата. То же изменение временной диаграммы работы светофора в зависимости от текущей ситуации даст лучший результат, чем аналог, привязанный к времени суток или дню недели. Предсказать поведение участников потока достаточно сложно. Фактически речь идет об управлении в условиях неопределенности. При формировании маршрутов современные алгоритмы учитывают единственный критерий. Чаще всего в качестве критерия для решения задачи маршрутизации принимается минимальная длина пути. В современных условиях при движении по кратчайшему расстоянию между начальной и конечной точкой можно потратить больше времени и энергетических ресурсов, чем при использовании длинного маршрута. Причиной этого является наличие пробок, длительные ожидания на светофорах, качество дорожного полотна и другое. Такой подход к маршрутизации приводит к увеличению количества и длины пробок на дороге. Следовательно, окружающая среда получает большую дозу загрязнений от выхлопных газов включенных двигателей. Снижение внимания водителей при длительном ожидании приводит к повышению риска аварийных происшествий.
Выходом из сложившейся ситуации может быть использование рациональной методики построения маршрутов. Слово «рациональный» (от лат. Rationalis – разумный) означает разумно обоснованный, целесообразный. [1] В приложении к управлению транспортными потоками рациональное управление заключается в принятии решения по нескольким критериям одновременно базируясь на динамической модели потока. Для формализации задачи рационального управления транспортным зададим обобщенный вектор критериев (1.1).

где ![]() значения критериев качества движения транспортного потока: интенсивность, плотность, скорость.
значения критериев качества движения транспортного потока: интенсивность, плотность, скорость.
Формализовать неопределенность можно представлением каждого из n критериев функцией от ряда дополнительных факторов:

При этом каждый из критериев является интервальной величиной и имеет верхний и нижний предел:

Дополнительные факторы включают в себя как управляющие воздействия, так и режимные параметры и особенности, например, тип транспортных средств, составляющих управляемый поток, время, в которое происходит движение, состояние дорожного полотна, погодные условия движения, мастерство лица, управляющего транспортным средством, наличие аварийных ситуаций на дороге. При формировании математической модели задачи рационального управления не стоит упускать из виду ограничения: пропускная способность дорог, максимально разрешенная скорость движения, правила дорожного движения и др. В рамках модели все ограничения сводятся к качественным показателям:
Задачу принятия рационального решения, которое обеспечит экстремальные значения по многим критерием в общем виде можно записать следующим образом:
В качестве решения такой задачи будет сформирован вектор ![]()
который сможет обеспечить требуемые характеристики движения управляемого транспортного потока. [2] При математическом описании задачи по выбору рационального маршрута движения потока с учетом накладываемых ограничений, решением задачи может считаться вектор ![]() , который описывает оптимальную последовательность движения
, который описывает оптимальную последовательность движения![]() по сформированному рациональному маршруту
по сформированному рациональному маршруту ![]() среди всех возможных путей в динамической транспортной сети
среди всех возможных путей в динамической транспортной сети ![]() .
.
Сама многокритериальная задача принятия решения в условиях неопределенности в таком случае описывается следующими выражениями:
В данной постановке задачи вводится понятие динамической транспортной сети – графа транспортной сети с множеством вершин и ребер. Множество вершит сети остается неизменным, множество ребер в каждый момент времени может принимать различные значения: ноль, бесконечность или численное значение критерия (интенсивность движения транспорта) (1.8).
3. Алгоритмическое и информационное обеспечение рационального управления транспортными потоками
Основным моментом в принятии рационального решения является оценка актуальной ситуации на дороге. На современном этапе технического развития целесообразно определять параметры потока по видеоизображению. Видеодетектирование дает информацию с высокой точностью, но требует больших вычислительных мощностей и времени. К тому же различна степень освещенности кадра в зависимости от времени суток и погодных условий приводит к значительному усложнению алгоритмов обработки и детектирования. Подготовительные работы по обработке подразумевают использование различных цветовых пространств, технологий нормализации, преобразования и эквализации. Подобные трансформации могут привести к искажению базового кадра и снижению точности выделения полезной информации. [3] Для определения интенсивности движения достаточно определять контура подвижных объектов (сопровождение от момента попадания в кадр до выхода из него) и подсчитывать их количество за определенный промежуток времени. [4] Чтобы сократить время обработки кадра необходимо привести его к нормированной яркости (эквализация). Использование правильной цветовой модели поможет избежать искажения. Так в цветовом пространстве YUV компонента Y отвечает за яркость кадра в чистом виде. Проводя обработку только по ней можно значительно повысить эффективность и скорость анализа. Само детектирование объектов целесообразно проводить параллельно по нескольким цветовым областям. При этом за базовое значение, отклонения от которого стоит искать берется код дороги в кадре в цветовом пространстве HSV. Алгоритм определения интенсивностей представлен на рис. 1.
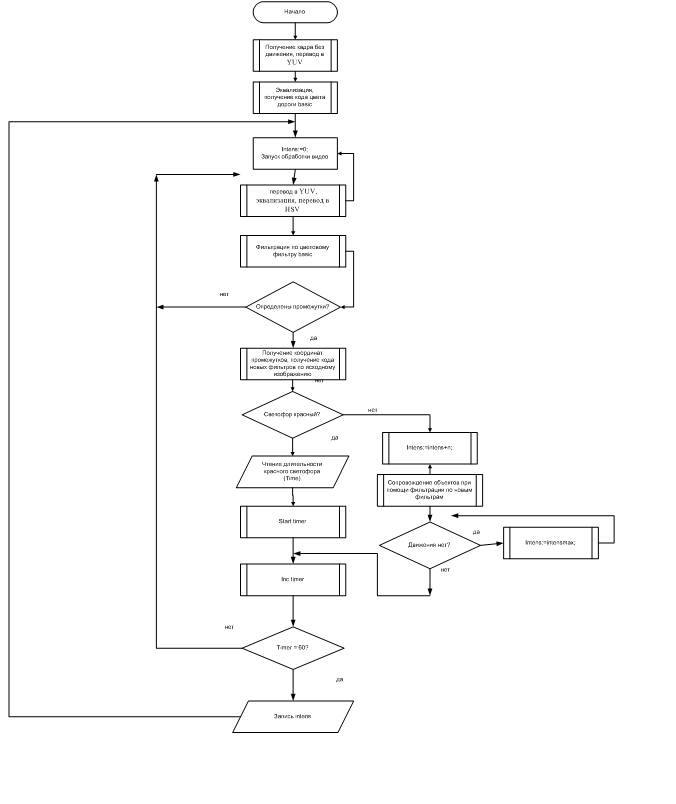
- Рисунок 1 – Алгоритм определения интенсивности движения по видеоданным
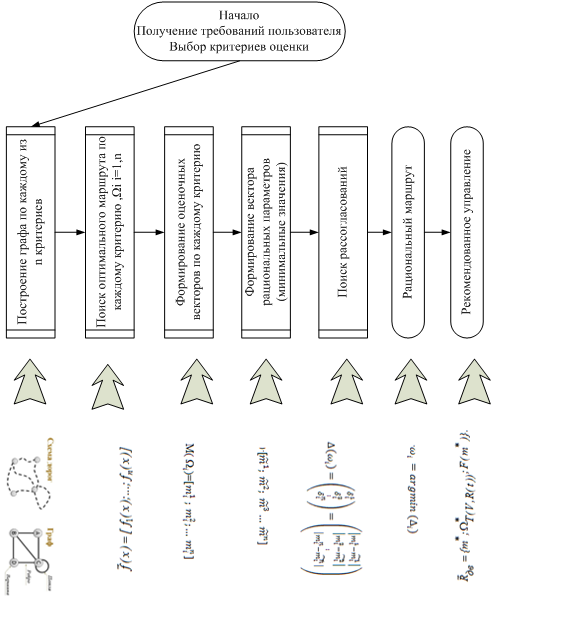
- Рисунок 2 – Алгоритм рационального управления
После получения актуальной информации можно переходить к применению алгоритмов рационального управления. Особенностью алгоритма является решение многокритериальной задачи в условиях неопределенности. Получить значения критериев, ограничений и актуальную информации можно по видеоданным (рис. 1). Управление можно производить посредством формирования рациональных маршрутов для водителей отдельных транспортных средств, перенаправлением или динамическим изменением параметров потоков при использовании средств ИТС. Структура принятия рационального решения представлена на рис. 2. Для выбора оптимального маршрута по i-му критерию могут использоваться стандартные алгоритмы поиска пути на графе: поиск в ширину или длину, алгоритм Дейкстры, алгоритм Флойда, динамический подход Беллмана [4]. Для учета динамических изменений в сети в выбранном алгоритме предлагается учитывать временные метки вершин. Метка присваивается в случае высокой плотности потока на участке, наличия светофоров с длительными циклами работы, аварий и подобное. Такая методика позволяет не только максимально качественно построить маршрут движения, но и дает возможность каждому водителю настроить параметры выбора для себя. Результаты моделирования маршрута (Национальный аэрокосмический университет – Южный вокзал) с применением методики и без нее и их сравнение представлены на рис. 3.
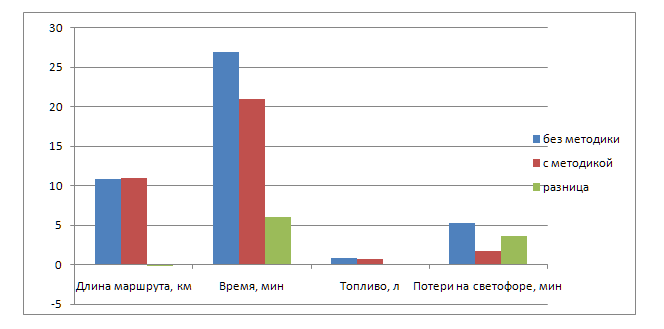
Рисунок 3 – Результаты планирования маршрутов
Заключение
Предложенный подход к рациональному управлению транспортными потоками с использованием средств ИТС поможет значительно повысить безопасность движения транспорта. Это достигается за счет эффективного управления загруженностью потоков и реакцией на нештатные ситуации. Следствием обеспечения беспрерывного движения без пробок станет снижение потребления энергетических и временных ресурсов, негативного влияния вредных выбросов на окружающую среду. Благодаря использованию динамических моделей алгоритмы помогают снять неопределенность при построении маршрутов и выдаче рекомендаций водителю. Предложенный подход к обработке видео помогает повысить качество и скорость получения параметров потока при обработке.
Библиографический список
- Kulik, A. Binocular technical vision for wheeled robot controlling [Текст] / A. Kulik, K. Dergachov, A. Radomskyi // Transport Problems, Faculty of Transport, Silesian University of Technology. – 2015. – PР. 55 – 62.
- Кулик, А.С. Рациональное управление работоспособностью автономных летательных аппаратов. Часть 2 [Текст] / А.С. Кулик // Международный научно-технический журнал «Проблемы управления и информатики», 2017. – № 4. – С. 87 – 104.
- Дергачёв К. Ю., Краснов Л. А., Пявка Е. В. Алгоритмы обнаружения объектов и оценки параметров их движения в системах технического зрения // Радіоелектронні і комп’ютерні системи. – 2017. – № 4(84). – С. 28 – 39.
- Radomskyi, O. Principles of Mobile Walking Robot Control in Scope of Technical Monitoring Tasks [Текст] / O. Radomskyi // Advances in Intelligent Systems and Computing,. Springer, Cham, 2017. – Vol. 582. – PP. 368 – 382.
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.