ОСОБЕННОСТИ РАБОТЫ ПОВЫШАЮЩЕ-ПОНИЖАЮЩЕГО КОРРЕКТОРА КОЭФФИЦИЕНТА МОЩНОСТИ В РЕЖИМЕ ПРЕРЫВИСТОГО И НЕПРЕРЫВНОГО ТОКОВ ДРОССЕЛЯ
1Филиал ФГБОУ ВО «Национальный исследовательский университет «МЭИ» в городе Смоленске, ассистент кафедры электроники и микропроцессорной техники
2Филиал ФГБОУ ВО «Национальный исследовательский университет «МЭИ» в городе Смоленске, магистрант кафедры электроники и микропроцессорной техники
3Филиал ФГБОУ ВО «Национальный исследовательский университет «МЭИ» в городе Смоленске, магистрант кафедры электроники и микропроцессорной техники
Аннотация
В статье исследованы свойства корректора коэффициента мощности, выполненного на основе последовательно-параллельного преобразователя. Благодаря переходу от мостового выпрямителя к безмостовой структуре удалось повысить КПД. Последовательный ключ на входе силового контура позволяет защитить преобразователь от перегрузок по току и повысить его надежность. Проанализированы основные соотношения для граничного режима тока дросселя и выведены регулировочные характеристики для РНТ и РПТ. Работа преобразователя с замкнутой обратной связью по напряжению проверена в среде MATLAB.
Ключевые слова: моделирование в MATLAB, обратная связь по напряжению, одноконтурная система управления, преобразовательная техника, прерывистый ток дросселя, регулировочная характеристика, самокоррекция
Рубрика: 05.00.00 ТЕХНИЧЕСКИЕ НАУКИ
Библиографическая ссылка на статью:
Дроздецкий С.В., Болобин И.А., Антоненков В.И. Особенности работы повышающе-понижающего корректора коэффициента мощности в режиме прерывистого и непрерывного токов дросселя // Современные научные исследования и инновации. 2019. № 5 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2019/05/89329 (дата обращения: 30.07.2026).
Неотъемлемой частью силовой электроники являются автономные энергетические системы с аккумуляторными батареями. Подобные системы, энергия в которых формируется генераторами переменного тока, с каждым днём приобретают новые темпы развития. В качестве генератора задействованы генераторы с возбуждением от постоянных магнитов, выходное напряжение которых варьируется в достаточно большом диапазоне. Подобное можно проследить и при работе преобразователя на аккумуляторную батарею: в данном случае напряжение на выходе также варьируется в широких пределах (может превышать или быть меньше напряжения на входе) [1, с. 432].
При работе преобразователя без ККМ потребляемый ток принимает форму кратковременного импульса. Подобное явление значительно уменьшает коэффициент мощности и приводит к неизбежному усилению габаритной мощности генератора. Перечисленные явления, носящие негативный характер, нейтрализуются путём использования ККМ.
Наиболее типовым и часто используемым является последовательно-параллельный преобразователь [2, с. 58]. Синтез данного силового контура и мостового выпрямителя является основой для реализации повыщающе-понижающего ККМ (рис. 1).
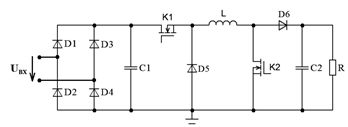
Рисунок 1. Однофазный мостовой ККМ
Показанный на рис. 1 силовой контур может быть преобразован. В результате преобразования все полезные свойства данного контура были сохранены, но уменьшилось количество используемых элементов (преобразователь содержит на один диод меньше) (рис. 2).
Показанный на рис. 2 силовой контур, также имеет общую точку напряжения на входе и выходе. Данная особенность обеспечивает параллельное подключение нескольких преобразователей на одну нагрузку и при этом управляющие сигналы от единого ШИМ-контроллера будут следовать на все задействованные транзисторы одновременно [3, с. 16].
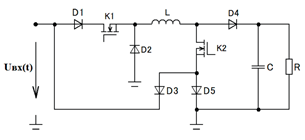
Рисунок 2. Однофазный безмостовой ККМ
На различных полупериодах напряжения сети преобразователь обладает различными особенностями и конфигурацией. Для положительного полупериода он являет собой синтез повышающего и понижающего регуляторов, соединенных последовательно, а на отрицательном — являет собой инвертирующий регулятор.
Ещё одной важной особенностью силового контура, показанного на рис. 2, является превосходная возможность самокоррекции в режиме прерывистого тока дросселя, что позволяет исключить из системы управления контур обратной связи, который был необходим для формирования тока синусоидальной формы на входе. Основным недостатком в данном режиме является наличие больших пульсаций тока на входе и низкая эффективность задействованных транзисторов и, как следствие, низкий КПД. В режиме непрерывных токов этот недостаток устраняется, но система управления становится более сложной.
Работа преобразователя в РПТ происходит на трёх временных интервалах: импульса, паузы и отсечки [4, с. 398]. Эквивалентная схема безмостового ККМ на интервале импульса приведена на рис. 3, а на интервале паузы и интервале отсечки на рис. 4.
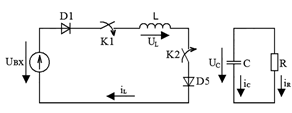
Рисунок 3. Эквивалентная схема ККМ на интервале импульса
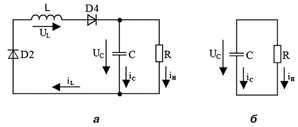
Рисунок 4. Эквивалентная схема ККМ на интервале паузы (а) и интервале отсечки (б)
Регулировочная характеристика в РПТ на положительном и отрицательном полупериодах сети имеет вид:
 |
(1)
|
где D1 и D2 — относительные длительности интервалов импульса и паузы.
Граничное значение K для РНТ/РПТ:
|
|
(2)
|
Обобщенная регулировочная характеристика для РПТ и РНТ имеет следующий вид:
.gif) |
(3)
|
Регулировочные характеристики преобразователя показаны на рис. 5. Прямые линии на рис. 5 демонстрируют работу преобразователя в РПТ с изменяющимся значением K, кривая линия соответствует РНТ.
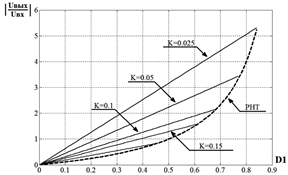
Рисунок 5. Регулировочные характеристики безмостового ККМ в РНТ и РПТ
Как видно из регулировочных характеристик, свойства преобразователя сильно зависят от режима работы тока дросселя.
Выражение для расчета дросселя безмостового ККМ в РПТ:
.gif) |
(4)
|
Минимальное значение дросселя достигается при максимальной мощности нагрузки и минимальном действующем напряжении:
.gif) |
(5)
|
где fK – частота коммутации.
Емкость конденсатора на выходе ККМ:
|
|
(6)
|
где kП – коэффициент пульсаций напряжение на выходе.
Результаты вычислений индуктивности и ёмкости с учётом запаса 20%: ёмкость конденсатора 3000 мкФ, индуктивность дросселя 11 мкГн.
Коэффициент заполнения импульсов зависит от действующего напряжения сети, но не зависит от мгновенного значения сети:
 |
(7)
|

Рисунок 6. Модель безмостового ККМ в MATLAB c обратной связью по напряжению
Для доказательства возможности работы безмостового ККМ с одноконтурной системой управления было проведено моделирование в MATLAB/Simulink (рис. 6, рис. 7). Исследование модели показало, что преобразователь с замкнутой обратной связью по напряжению работает устойчиво, параметры реактивных элементов рассчитаны верно.
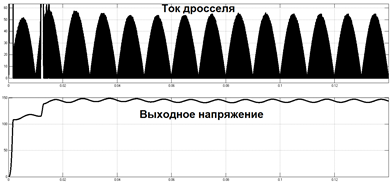
Рисунок 7. Ток дросселя и выходное напряжение безмостового ККМ в MATLAB
Возможность самокоррекции позволяет отказаться от токового контура в системе управления и значительно упрощает проектирование по сравнению с системами подчиненного регулирования. Защита преобразователя от перегрузок по току в РПТ обязательна, но она реализуется намного проще за счет релейного характера блока отслеживания тока и отсутствия проблем с устойчивостью.
Библиографический список
- Мелешин В.И. Транзисторная преобразовательная техника. — М.: Техносфера, 2005. — 632 с.
- Ф. Чаки, И. Герман, И. Ипшич. Силовая электроника: Примеры и расчёты — М.: Энергоиздат, 1982.
- Колпаков А.И. В лабиринте силовой электроники. — СПб.: Буковского, 2000. — 96 с.
- Семёнов Б.Ю. Силовая электроника: профессиональные решения. — М.: СОЛОН-ПРЕСС, 2011.—416 с.
Все статьи автора «Болобин Илья Андреевич»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.