Исследования последних лет свидетельствуют об устойчивой динамике увеличения числа инвалидов. По оценкам, более миллиарда человек, или около 15% населения мира (согласно оценке глобальной численности населения 2010 года), живут с какой-либо формой инвалидности и нуждаются в реабилитации двигательной активности [1].
На сегодняшний день в реабилитации распространена методика обучения движению. Методика основана на процессе компенсации нарушенных функций организма. В результате нарушения или полной утраты каких-либо функций происходит компенсаторная перестройка, которая включает восстановление и замещение утраченных возможностей, а также изменение последних, что в свою очередь приводит к полному или частичному восстановлению. В процессе компенсации важную роль играет ЦНС. Изменяется характер связей и взаимодействия между периферической и центральной нервной системой. По мере отработки образующихся связей характер афферентации изменяется. Обучение представляет собой процесс, ассоциирующийся с практикой или прошлым опытом. Обучение происходит в несколько стадий: когнитивная, ассоциативная, и автономная.
Создание электромиографа, отображающего в режиме реального времени сигнал электромиограммы при выполнении пациентом реабилитационной терапии, позволит значительно ускорить процесс реабилитации и возращения человека к нормальному ритму жизни.
Потенциал покоя мембраны мышечного волокна составляет 80-90 мВ. При возбуждении нервной клетки в аксональном холмике возникает потенциал действия, который распространяется вдоль аксона. Распространение нервного импульса по аксону происходит за счет последовательной деполяризации мембраны с образованием потенциала действия со скоростью около 15-120 м/с. Длительность потенциала действия мышечного волокна– 3-5 мсек,. Поэтому максимальное число импульсов, которое может воспроизводить мышца, не превышает 200-250 импульсов в секунду [2].
Наименьшим мышечным элементом, сокращение которого может происходить под действием воли является двигательная единица. Волокна, образующие двигательные единицы лежат вдоль мышцы и активизируются синхронно. Суммарным результатом сокращения нескольких ДЕ мышц является ее механический отклик. Потенциал действия мышцы представляет собой суперпозицию всех потенциалов действий ДЕ, входящих в нее. Амплитуда биоэлектрического сигнала мышцы варьируется от 20 мкВ до 3 мВ. Достаточно широкая полоса значений обусловлена физиологическими особенностями каждого человека [3].
Поверхностная электромиограмма, регистрируемая с помощью поверхностных электродов, представляет собой суперпозицию всех сигналов мышц.
Основной спектр сигнала электромиограммы располагается в пределах от 10 до 500 Гц, но при реабилитации используется сигнал электромиограммы в диапазоне от 120 до 500 Гц [4]. Следовательно, верхней значимой границей ЭМГ сигнала примем 500 Гц.
Одним из важных этапов разработки является схемотехническая часть. Основное предназначение аналоговой части схемы заключается не только в регистрации, но и в первичной фильтрации и усилении сигнала. Для этого в схему добавлен инструментальный усилитель, фильтр верхних частот, фильтр нижних частот и масштабирующий усилитель[5].
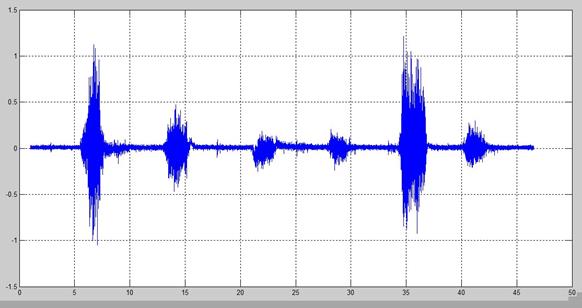
Рис.1 – Зарегистрированный сигнал электромиограммы
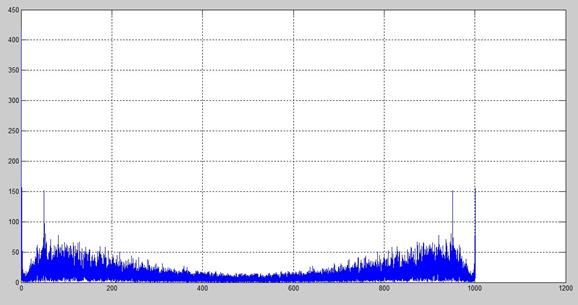
Рис.2 – Спектр сигнала электромиограммы
Полученный сигнал электромиограммы был отфильтрован в среде Matlab с помощью разработанных полосно-пропускающих фильтров.
Рисунок 3 показывает сигнал электромиограммы после фильтрации ППФ КИХ фильтром.
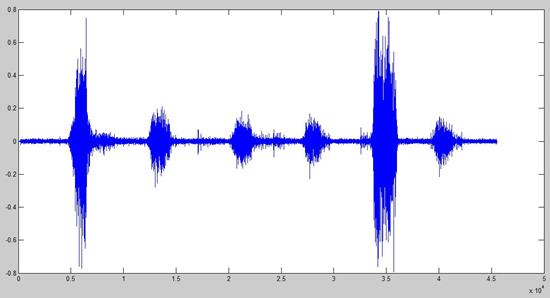
Рис. 3 – Сигнал электромиограммы после фильтрации ППФ КИХ фильтром
Рисунок 4 показывает спектр сигнала ЭМГ после фильтрации ППФ КИХ фильтром 395 порядка. Как видно из рисунка, фильтр срезал все частоты в полосе ниже 120 Гц.
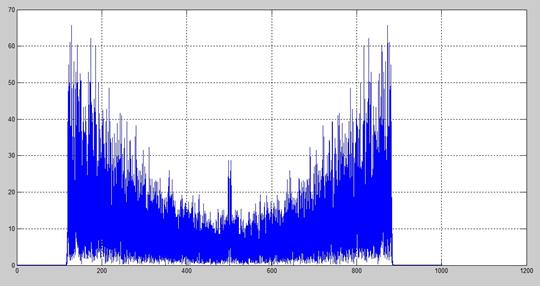
Рис. 4 – Спектр сигнала электромиограммы после фильтрации ППФ КИХ фильтром
Разрабатываемая биотехническая система (БТС) относится к классу диагностических приборов. В основе работы лежит возникновение потенциалов на поверхности кожи при совершении мышечной активности. Обратная связь осуществляется врачом, контролирующим показания, поступающие на монитор в режиме реального времени. Потенциалы регистрируются поверхностными электродами. Затем снятые потенциалы отведений обрабатываются инструментальным усилителем, который подавляет синфазную помеху. Частота миограммы располагается в полосе частот от 1Гц до 500 Гц. Для удаления других частот используются фильтры высоких и низких частот. Сигнал проходит через фильтр высоких частот для удаления дрейф-изолинии[5]. Чтобы избежать эффекта, приводящего к наложению, неразличимости различных непрерывных сигналов при их дискретизации (алайзинг-эффекта), используется фильтр низких частот. Для восприятия микроконтроллером сигнала, амплитуду электромиографического сигнала можно увеличить с помощью масштабирующего усилителя и передать ее на вход АЦП. Питание блока ЭМГ осуществляется от источника опорного напряжения. В схему питания входит трансформатор, диодный мост, выполняющий роль выпрямителя тока и стабилизатор.
Библиографический список
- http://www.who.int/disabilities/world_report/2011/report/ru/
- Николаев С.Г. Практикум по клинической электромиографии, Издание второе, переработанное и дополненное. Иваново, 2003 – 15 - 64.
- Физиотерапия: учебное пособие / Гафиятуллина Г. Ш. [и др.]. Учебное пособие. Издательская группа «ГЭОТАР-Медиа», 2010. - 272 с.
- Criswell E. Surface Electromyography, 2nd edition. Sonoma State University, Jones and Bartlett Publishers – Sudbury, Massachusetts, 2011.
- Мошиц Г., Хорн П. Проектирование активных фильтров: Перевод с английского. – Москва: Издательство ‘Мир’, 1984, C. 119-125.