ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ДИФФЕРЕНЦИАЛЬНОГО ГИДРОЗАМКА В ГИДРОСИСТЕМЕ ПОГРУЗОЧНОГО МАНИПУЛЯТОРА
1ФГБОУ ВО «Волгоградский государственный аграрный университет», доцент кафедры «Механика»
2ФГБОУ ВО «Волгоградский государственный аграрный университет», доцент кафедры «Механика»
Аннотация
В статье представлен инженерный расчет параметров дифференциального гидравлического замка для погрузочных гидравлических манипуляторов. Предложенный дифференциальный гидрозамок позволяет повысить плавность движения штока исполнительного цилиндра в момент включения гидросистемы и предотвратить перегрузки гидросистемы погрузочного манипулятора.
Ключевые слова: гидрозамок, Гидропривод, Манипулятор
DEFINING THE PARAMETERS OF THE DIFFERENTIAL HYDRAULIC LOCK IN THE HYDRAULIC LOADING MANIPULATOR
1Volgograd State Agricultural University, Ph.D., assistant professor of "Mechanics"
2Volgograd State Agricultural University, Ph.D., assistant professor of "Mechanics"
Abstract
The article presents an engineering calculation hydraulic differential lock options for loading hydraulic manipulators. The proposed pilot controlled check valve allows the differential to increase fluidity of movement of the executive cylinder rod at the moment when the hydraulic system and the hydraulic system to prevent overload of the loading manipulator.
Рубрика: 05.00.00 ТЕХНИЧЕСКИЕ НАУКИ
Библиографическая ссылка на статью:
Несмиянов И.А., Хавронин В.П. Определение параметров дифференциального гидрозамка в гидросистеме погрузочного манипулятора // Современные научные исследования и инновации. 2016. № 3 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2016/03/64732 (дата обращения: 12.07.2026).
В гидрофицированных погрузочных манипуляторах и кранах широко используют гидрозамки, как средство обеспечения безопасной работы грузоподъемных устройств, а также различные упругодемпфирующие элементы в гидроагрегатах для улучшения динамических характеристик исполнительного гидропривода [1, 2, 3].
Для повышения плавности движения штока исполнительного цилиндра гидравлического погрузочного манипулятора в момент включения гидросистемы и предотвращение перегрузки гидросистемы предлагается гидравлическая система (рис.1), которая содержит бак 1, насос 2, предохранительный клапан 3, распределитель 4, фильтр 5. Полости исполнительного гидроцилиндра 6 подключены к распределителю 4 через двухсторонний дифференциальный гидрозамок 7, на входах которого в свою очередь установлены дроссели 8, 9 и обратные клапаны 10, 11. [4].
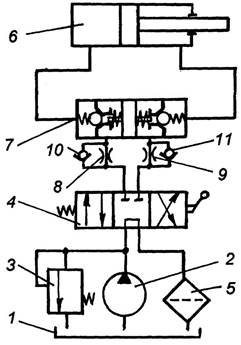 Рисунок 1 – Гидравлическая схема с дифференциальным гидрозамком
Рисунок 1 – Гидравлическая схема с дифференциальным гидрозамком
Дифференциальный гидрозамок в данном случае выполняет не только роль запирания полостей гидроцилиндров с целью предотвращения самопроизвольного опускания груза, но и действуют как средство снижения динамических воздействий на звенья манипулятора. Последнее необходимо для того, чтобы снизить гидравлические удары при использовании электроуправляемых гидрораспределителей, ведь скорость перемещения золотников электрогидрораспределителей намного больше скорости ручного переключения золотников [5, 6, 7].
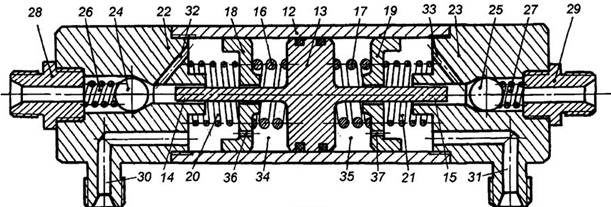 Рисунок 2 – Дифференциальный гидрозамок
Рисунок 2 – Дифференциальный гидрозамок
Двухсторонний дифференциальный гидрозамок 7 (рис. 2) состоит из корпуса 12, поршня 13 с толкателями 14 и 15, поджатого с обеих сторон пружинами 16, 17 через дополнительные поршни 18, 19 и пружины 20, 21, которые в свою очередь упираются соответственно в крышки 22 и 23, в крышках 22 и 23 установлены соответственно шариковые обратные клапаны 24 и 25, поджатые пружинами 26 и 27. В крышки 22 и 23 вкручены штуцеры 28 и 29, для подключения к исполнительному гидроцилиндру 6, в крышках выполнены подводы 30, 31 для подключения к распределителю 4, а также дроссельные отверстия 32 и 33.
Поршень 13 разделяет корпус 12 на две полости 34 и 35. В дополнительных поршнях 18 и 19 выполнены дроссельные отверстия 36 и 37 соответственно. Поршни 13, 18, 19, шариковые обратные клапаны 24, 25 и пружины 16, 17, 20, 21, 26, 27 установлены в корпусе 12 соосно.
Работа осуществляется следующим образом. При перемещении золотника распределителя 4 вправо жидкость от насоса 2 поступает через дроссель 8 и обратный клапан 10 и подвод 30 в полость 34 гидрозамка 7. Под действием давления жидкости через отверстие 32 шариковый обратный клапан 24 открывается, сжимая пружину 26 и жидкость через штуцер 28 поступает в поршневую полость исполнительного цилиндра 6, давление начинает возрастать и дополнительный поршень 18, сжимая пружину 16, перемещает поршень 13, который также начинает перемещаться вправо под действием давления жидкости в полости 34 в свою очередь, сжимая пружины 17 и 21. Так как пружина 21 имеет меньшую жесткость чем пружина 17, то вместе с поршнем 13 начинает перемещаться и дополнительный поршень 19, при этом происходит дросселирование жидкости через отверстие 37 в дополнительном поршне 19, за счет этого происходит демпфирование и более плавное перемещение поршня 13 вместе с толкателем 15. Посредством толкателя 15 отжимается шариковый обратный клапан 25, при этом часть вытесняемой жидкости из полости 35 через штуцер 29 поступает в штоковую полость цилиндра 6, а часть поступает через подвод 21, дроссель 9, распределитель 4 и фильтр 5 на слив, обратный клапан 11 при этом закрыт, шток цилиндра 6 начинает медленно перемещаться. Во время перемещения поршня 13 до упора вправо в штоковой полости цилиндра 6 также будет избыточное давление, несколько большее, чем рабочее давление слива, в результате чего в момент включения гидропривода страгивание штока гидроцилиндра 6 произойдет более плавно.
При возврате золотника распределителя 4 в нейтральное положение поршень 13 под действием пружин 17 и 21 вернется в первоначальное положение равновесия, клапаны 24 и 25 под действием пружин 26 и 27 соответственно перекроют отверстия в крышках 22 и 23, гидроцилиндр 6 запирается.
Конструкция двухстороннего дифференциального гидрозамка 7 симметрична относительно поршня 13, вследствие чего при перемещении золотника распределителя 4 влево, работа гидросистемы происходит аналогичным образом. В этом случае поршень 13 перемещается влево, толкателем 14 отжимается шариковый клапан 24, клапан 25 открывается под действием давления жидкости.
В нейтральном положении распределителя 4, когда клапаны 24 и 25 закрыты и в полости исполнительного цилиндра не подается жидкость, шток цилиндра 6 зафиксирован.
Для гидросистем, у которых шток исполнительного цилиндра 6 находится в нагруженном состоянии и соответственно давление в одной из полостей, например, в поршневой полости цилиндра 6 и полости 34 гидрозамка 7 будет изначально избыточным, жесткость пружины 17 должна быть больше жесткости пружины 16, и соответственно жесткость пружины 21 должна быть больше жесткости пружины 20 с целью обеспечения стабильной работы гидросистемы.
Различные жесткости пружин 20, 21 и 16, 17, а также дроссельные отверстия 36 и 37 в дополнительных поршнях 18 и 19 соответственно позволяют получить нелинейный закон перемещения поршня 13 с толкателями 14 и 15, а соответственно и нелинейную характеристику страгивания штока исполнительного цилиндра 6, а также гасить колебания давления в гидросистеме.
Стабильность работы гидросистемы с двухсторонним дифференциальным гидрозамком 7 и эффект плавности включения гидросистемы напрямую зависит от соотношения объема полостей гидроцилиндра 6 и объема полостей 34 и 35 гидрозамка 7. Чем больше объем полостей 34 и 35, тем выше плавность страгивания штока исполнительного цилиндра 6.
Основными элементами в дифференциальном гидрозамке, обеспечивающими плавность движения штока гидроцилиндра, являются пружины (рис.3).
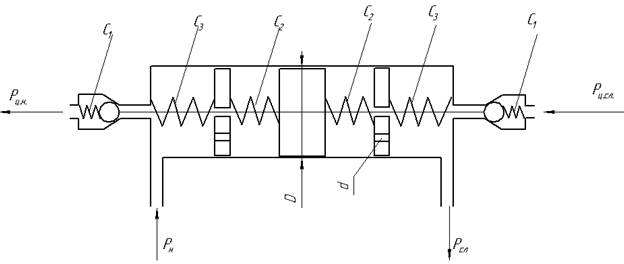 Рисунок 3. – Расчетная схема дифференциального гидрозамка
Рисунок 3. – Расчетная схема дифференциального гидрозамка
Расчет жесткости пружин С2 и С3 будем вести исходя из получения кусочно-линейной характеристики.
Усилие Fн возникающее при давлении Рн в полости гидроцилиндра![]()
где
![]() - площадь поршня.
- площадь поршня.
Примем диаметр поршня 50 мм, тогда
![]()
При минимальном рабочем давлении срабатывания (при минимальных грузах 50…100 кг)
![]()
Для расчета пружин принимаем индекс пружины с = 8, при этом коэффициент формы пружины будет k = 1,1.
Усилие развиваемое пружиной
![]()
где τ – напряжение сдвига, МПа;
D – диаметр пружины, мм;
d – диаметр проволоки пружины, мм.
Из конструктивных соображений примем диаметр пружин С2 и С3 не более 40 мм и при напряжении [τ] = 400 МПа, получим
![]() откуда
откуда
![]() Для пружины С3
Для пружины С3
![]() примем d3 = 10 мм
примем d3 = 10 мм
Индекс пружины с = D/d = 40/10 = 4.
Определим число рабочих витков
![]()
λ – заданное перемещение пружины, примем λ = 20 мм;
G = 8·104 МПа – модуль сдвига для пружинной стали 65 Г
![]() примем i = 8 витков
примем i = 8 витков
Определим длину пружины в сжатом состоянии
Lсж3 = tсж (i – 2) + d (iоп + 1) ,
где iоп – число опорных витков, iоп = 2;
tсж = d + S – шаг рабочих витков;
S – минимальный зазор между витками, S = 0,1d = 0,1·10 = 1 мм
Lсж3 = (10 + 1)(8 – 2) + 10 (2 + 1) = 11 · 6 + 30 = 96 мм.
Длина пружины в свободном состоянии
L3 = Lсж3 + λ = 96 + 20 = 116 мм.
Жесткость пружины
![]() Уменьшив усилие F в 2 раза проведем расчет для пружины С2 аналогично выше проведенным
Уменьшив усилие F в 2 раза проведем расчет для пружины С2 аналогично выше проведенным
![]() примем d2 = 8 мм
примем d2 = 8 мм
Индекс пружины с = D/d = 40/8 = 5
Число рабочих витков
![]() примем i = 10 витков
примем i = 10 витков
Длина пружины в сжатом состоянии
Lсж2 = 11(10 – 2)+8(2 + 1) = 88 + 24 = 112 мм.
Длина пружины в свободном состоянии
L2 = Lсж2 + λ = 112 + 20 = 122 мм.
Жесткость пружины
![]()
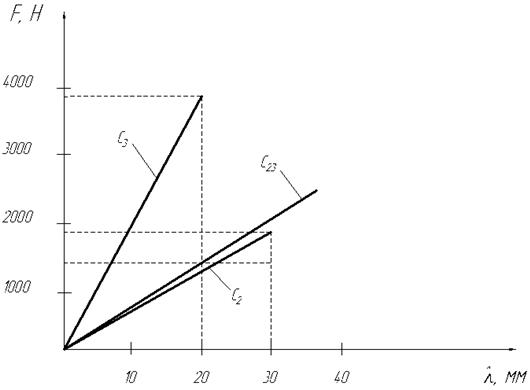 Рисунок 4 – Характеристики упругих элементов
Рисунок 4 – Характеристики упругих элементов
Для достижения большей податливости пружины С2 и С3 установлены последовательно. Податливость системы равна суммарной податливости последовательно включенных пружин, при этом должно выполняться условие
i3d3 = i2d2
8·10 = 10·8 , выполняется.
Суммарная эквивалентная жесткость (рис.4)
![]()
Полученная минимальная длина конструкции дифференциального гидрозамка Lк = 0,7·D + 2·Lсж2 + 2·Lсж3 = 0,7·50 +2·96 +2·112 = 451 мм. Что вполне приемлемо для размеров погрузочного манипулятора.
Таким образом, предложенный дифференциальный гидрозамок позволяет повысить плавность движения штока исполнительного цилиндра в момент включения гидросистемы и предотвратить перегрузки гидросистемы погрузочного манипулятора, а проведенные инженерные расчеты позволили определить основные параметры дифференциального гидрозамка.
Испытание работоспособности дифференциального гидрозамка проводилось на лабораторном стенде, имитирующем работу погрузочного манипулятора при давлениях в гидросистеме до 10 МПа.
Библиографический список
- Пындак, В.И. Расширение функциональных возможностей гидроманипуляционных систем. / Пындак В.И., Воробьева Н.С., Несмиянов И.А.// Известия Нижневолжского агроуниверситетского комплекса: Наука и высшее профессиональное образование. 2015. № 3 (39). С. 158-162.
- В М. Герасун, В.И.Пындак, И.А.Несмиянов, В.В.Дяшкин-Титов, В.Е.Павловский. Манипуляторы для мобильных роботов. Концепции и принципы проектирования // Препринт ИПМ им. М.В.Келдыша. 2012. №44. 24 с. URL://library.keldysh.ru/preprint.asp?id=2012-44.
- Патент РФ №2455222. Гидропривод погрузчика с поворотной колонной. Несмиянов И.А., Герасун В.М., Воробьева Н.С., Токарев В.И., Турыгин П.В. Опубл. 10.07.2012. Бюл.№19.
- Патент РФ №2362916. Гидравлическая система. Несмиянов И.А., Хавронин В.П., Фомин С.Д., Хавронина В.Н. Опубл. 04.04.2008.
- Токарев В.И., Курбанов Д.Б., Несмиянов И.А. Направления совершенствования погрузчиков сельскохозяйственного назначения // Современные научные исследования и инновации. 2012. № 3 [Электронный ресурс]. URL: http://web.snauka.ru/issues/2012/03/10518.
- Несмиянов, И.А. Улучшение динамических характеристик гидропривода погрузчика. /Несмиянов И.А., Лапынин Ю.Г.// Тракторы и сельскохозяйственные машины. 2001. №6. С.36-37.
- Несмиянов, И.А. Эластичный привод гидронасоса как способ снижения энергопотребления гидромашин./ Несмиянов И.А., Хавронин В.П.// Тракторы и сельскохозяйственные машины. 2007. №6. С.45-46.
Все статьи автора «Несмиянов Иван Алексеевич»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.