РАСШИРЕНИЕ ФУНКЦИОНАЛЬНЫХ ВОЗМОЖНОСТЕЙ НАВЕСНОГО ПОГРУЗОЧНОГО МАНИПУЛЯТОРА НПМ-0,8
1ФГБОУ ВО Волгоградский государственный аграрный университет, магистрант кафедры «Механика»
2Царицынская зерновая компания, генеральный директор
Аннотация
В статье предложены обоснованные инженерные решения по расширению функциональных возможностей погрузочных манипуляторов с пространственным исполнительным механизмом для контейнерных погрузочно-разгрузочных работ.
Ключевые слова: контейнер, контроль положения груза, погрузочный манипулятор, силовой анализ
EXPANSION OF THE HINGED MANIPULATOR LOADING FUNCTIONALITY NPM-0.8
1Volgograd State Agricultural University, graduate student of the department "Mechanics"
2Tsaritsynskaya Grain Company, CEO
Abstract
In the article grounded engineering solutions to expand the functionality of loading manipulators with actuator space for container handling operations.
Рубрика: 05.00.00 ТЕХНИЧЕСКИЕ НАУКИ
Библиографическая ссылка на статью:
Басакин Д.С., Токарев В.И. Расширение функциональных возможностей навесного погрузочного манипулятора НПМ-0,8 // Современные научные исследования и инновации. 2016. № 9 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2016/09/70836 (дата обращения: 11.07.2026).
В процессе производства сельскохозяйственной продукции погрузочно-разгрузочные операции в большинстве случаев выполняются вручную. Применение кранов на погрузочно-разгрузочных работах требует как минимум двух рабочих – оператора и стропальщика, причем работы по строповке ящиков, контейнеров других грузов выполняются вручную.
Целесообразным является использование таких механизированных средств и технологических схем, где число рабочих сокращено до минимума. Это позволит интенсифицировать производство и повысить производительность труда с улучшением их условий на трудоемких погрузочных операциях.
Для некоторых погрузочно-разгрузочных операций целесообразно использовать недорогие, небольшой массы погрузчики, которые можно было бы быстро монтировать на период сезонных работ. По своей конструкции такие погрузки должны быть простыми, обслуживание должно осуществляться одним рабочим. С целью универсальности таких погрузчиков, они должны быстро перелаживаться. Всем этим требованиям удовлетворяют навесные погрузочные манипуляторы с пространственным исполнительным механизмом, целая серия которых разработана в Волгоградском государственном аграрном университете.
Навесной погрузочный манипулятор НПМ-0,8 (рис.1) предназначен для выполнения погрузочно-разгрузочных работ со штучными грузами: контейнерами, тюками, мешками и т.п., а также для выполнения подсобных работ на складах, площадках для хранения техники, животноводческих фермах. Манипулятор навешивается по трехточечной схеме шарнирно на штатную навесную систему трактора, посредством которой переводится в транспортное и рабочее положение. Манипулятор удобен в эксплуатации. Данная модель получила самое широкое распространение из всех разработанных кафедрой манипуляторов, техническая характеристика манипулятора приведена в таблице 1 [1, 2]. 
Рисунок 1 – Навесной погрузочный манипулятор НПМ-0,8, агрегатируемый с трактором МТЗ-82.
Таблица 1. Техническая характеристика навесного погрузочного манипулятора НПМ-0,8
|
Техническая характеристика |
|
| Грузоподъемность, т |
0,8 |
| Агрегатируется с машинами |
МТЗ-80(82), ВТ-100 (200) |
| Высота подъема наибольшая, м |
4,3 |
| Вылет стрелы наибольший, м |
3,8 |
| Угол поворота стрелы в горизонтальной плоскости, град |
150 (±75) |
| Масса навесного оборудования, кг |
480 |
Процесс погрузки и разгрузки сельскохозяйственных и др. грузов включает следующие основание операции:
- захват груза;
- подъем груза;
- перемещение груза в определенное место;
- опускание груза;
- освобождение захвата.
Выполнение этих операций во многом зависит от удачного решения конструкции погрузочного средства и его условий [5, 6, 9].
Для расширения возможностей погрузочного манипулятора НПМ-0,8 при погрузке-разгрузке контейнеров и других штучных грузов предлагается установить вместо крюковой подвески вильчатый захват. Причем, для большей маневренности захвата и удержания груза в постоянном положении (горизонтально, либо под определенным углом) предлагается использовать параллелограммный механизм, который в свою очередь может изменяться дополнительно введенным для этого гидроцилиндром. Конструкция устройства для погрузки контейнеров (рис.2) состоит из стрелы 1, рукояти 2, шатуна 3 и коромысел 4. Шатун 3 и коромысла 4 составляют параллелограммный механизм. Вильчатый захват 5 крепится к рукояти 2, относительно которой он может проворачиваться, нижняя часть захвата соединена с шатуном 3. Гидроцилиндром 6 изменяется конфигурация параллелограммного механизма.
 Рисунок 2 – Эскиз механизма для погрузки контейнеров.
Рисунок 2 – Эскиз механизма для погрузки контейнеров.
Проведя кинематическое исследование (рис.3) предлагаемого параллелограммного механизма вильчатого захвата были определены основные геометрические параметры рычагов и тяг, а также общие геометрические характеристики манипулятора (зона обслуживания, высота подъема груза):
- Высота подъема груза рукоятью – 1000 мм;
- Высота подъема груза стрелой – 2100 мм;
- Высота подъема груза одновременно стрелой и рукоятью – 3500 мм.
Длины рычагов параллелограммного механизма Lр = 320 мм, длина тяги Lт = 1500 мм. Длина игл вильчатого захвата Lи = 800 мм принята из условия полного захвата контейнера.
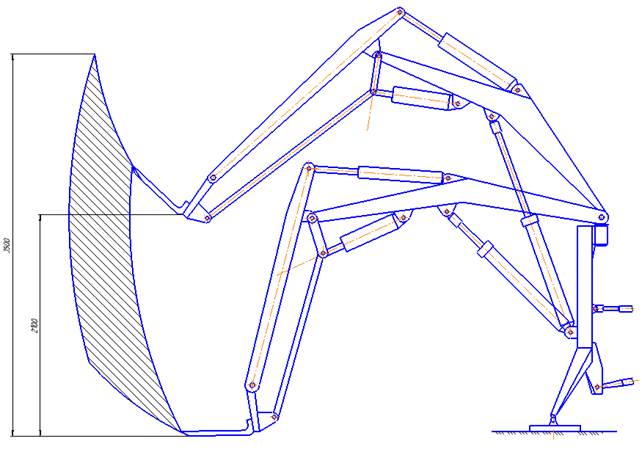 Рисунок 3 – Зона обслуживания вильчатого захвата манипулятора
Рисунок 3 – Зона обслуживания вильчатого захвата манипулятора
Для определения усилия на шток цилиндра и его выбора проведен силовой анализ механизма [3, 7].
Приняв массы звеньев: m3 = 36 кг – масса захвата; Мр = 5 кг – масса рычага; Мт = 12 кг – масса шатуна, определены силы тяжести сосредоточенных масс:
G3 = m3g = 36 x 9.8 = 353 H;
Gp=mpg = 5 х 9,8 = 46 Н;
Gt = mtg = 12 х 9,8 = 118 Н.
Приняв массу груза mгр = 500 кг, тогда Gгр = 500 х 9,8 = 4900 Н.
Для определения реакций в шарнирах составлены уравнения моментов:
![]()
![]()

![]()
Все искомые реакции и усилия определены методами кинетостатики (рис. 4).


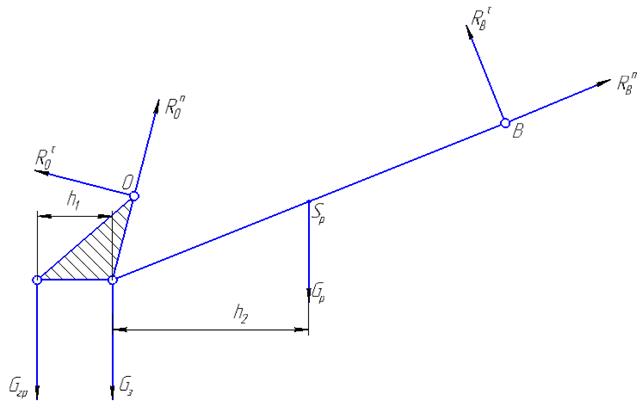
Рисунок 4 – К определению реакций в шарнирах
Для определения усилия на шток гидроцилиндра 6 а также полных реакций в шарнирах построен силовой многоугольник (рис.5).
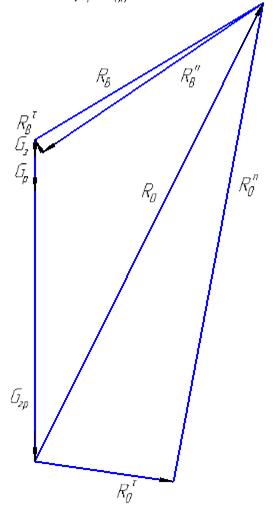 Рисунок 5 – Силовой многоугольник
Рисунок 5 – Силовой многоугольник
![]() RO = 5 × 185 = 925 H
RO = 5 × 185 = 925 H
RB = 5 × 95 = 425 H
Тогда усилие на шток составляет N = 5 × 72 = 360 Н. Зная усилие на шток выбирается гидроцилиндр Ц40.25.200.00-I.
Для повышения удобства контроля и управления вилочным захватом фронтального погрузчика с рабочего места оператора, исключение опрокидывания и соскальзывания груза с вилочного захвата при движении погрузчика на погрузочном манипуляторе может быть применено устройство контроля положения груза на вильчатом захвате [4, 8, 10, 11, 12].
Датчик положения 1 (рис.6) крепится к вилочному захвату 2, на котором расположен контейнер 3.
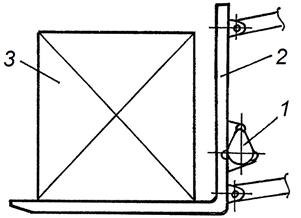
Рисунок 6 – Расположение датчика положения на захвате контейнера
Визуализация угла наклона груза на вилочном захвате относительно горизонтали осуществляется посредством информационной панели (рис.7), размещенной в кабине оператора. Панель имеет пять светофильтров: красный 1, оранжевый 2, зеленый 3, оранжевый 4 и красный 5, имеющие изображения соответствующего угла наклона вилочного захвата.
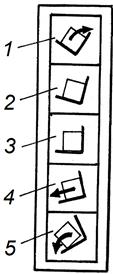 Рисунок 7. – Информационная панель системы контроля положения контейнера
Рисунок 7. – Информационная панель системы контроля положения контейнера
При наклоне вилочного захвата влево на определенный угол контейнер также наклоняется на тот же угол, вместе с вилочным захватом наклоняется и датчик положений 1 (рис.6). При наклоне корпуса датчика влево от вертикали начинает светиться оранжевым цветом светофильтр 4 (рис.7), информирующий оператора о том, что груз наклонен и требуется его выравнивание посредством системы управления наклоном вилочного захвата.
При большом угле наклона вилочного захвата влево засветится красным цветом светофильтр 5 (рис.7), информируя оператора о критическом наклоне вилочного захвата и принятии решений о незамедлительном выравнивании груза относительно горизонтали.
При наклоне вилочного захвата вправо работа системы происходит аналогично, светятся светофильтры 1 или 2 (рис.7).
Таким образом, предложенное устройство для погрузки-разгрузки контейнеров расширяет функциональные возможности погрузочного манипулятора, а также повышает удобство контроля и управления вилочным захватом погрузчика с рабочего места оператора.
Библиографический список
- Несмиянов, И.А. Улучшение динамических характеристик гидропривода погрузчика / И.А. Несмиянов, Ю.Г. Лапынин // Тракторы и сельскохозяйственные машины. – 2001. - №6. – с. 36-37.
- Герасун, В.М. Системы управления манипуляторами на основе пространственных исполнительных механизмов / В.М. Герасун, И.А. Несмиянов // Мехатроника, автоматизация, управление. – 2010. - №2. - С.24-28.
- Герасун, В.М. Рычажные механизмы в телескопических стрелах погрузочных манипуляторов / В.М. Герасун, И.А. Несмиянов, П.В. Турыгин // Тракторы и сельхозмашины. – 2011. - №8. – с.32-35.
- Несмиянов, И.А. Программно-аппаратный комплекс мониторинга эксплуатационно-технологических параметров погрузочного агрегата. / Несмиянов И.А., Евдокимов А.П., Токарев В.И., Захаров Е.Н. // Известия Нижневолжского агроуниверситетского комплекса: наука и высшее профессиональное образование. – 2014. - №4(36). – с.227-231.
- Пындак, В.И. Расширение функциональных возможностей гидроманипуляционных систем. / В.И. Пындак, Н.С. Воробьева, И.А. Несмиянов // Известия Нижневолжского агроуниверситетского комплекса: Наука и высшее профессиональное образование. - 2015. - № 3 (39). - С. 158-162.
- Токарев, В.И. Направления совершенствования погрузчиков сельскохозяйственного назначения. / В.И. Токарев, Д.Б. Курбанов, И.А. Несмиянов // Современные научные исследования и инновации. - 2012. - № 3 [Электронный ресурс].- Режим доступа: http://web.snauka.ru/issues/2012/03/10518.
- Герасун, В.М. Силовой анализ манипулятора с l-координатным исполнительным механизмом / В.М. Герасун, В.В. Жога, И.А. Несмиянов, В.В. Дяшкин-Титов // Прогресс транспортных средств и систем - 2013: материалы Международной научно-практической конференции, 24-26 сентября 2013 г./ ВолГТУ. – Волгоград, 2013 – с.316.
- Несмиянов, И.А. Система мониторинга эксплуатационно-технологических параметров работы погрузочного агрегата / И.А. Несмиянов, В.И. Токарев, Е.Н. Захаров // Приборостроение-2014: материалы 7-й Международной научно-технической конференции (19–21 ноября 2014 года, Минск, Республика Беларусь) / ред. колл.: О. К. Гусев [и др.]. – Минск: БНТУ, 2014. – С. 104 - 106.
- Несмиянов, И.А. Расширение технологических возможностей погрузочного манипулятора с расширенной зоной действия. [Электронный ресурс] / И.А. Несмиянов, Н.С. Воробьева, В.П. Хавронин, В.И. Токарев // Современная техника и технологии. - 2014. - №5, - Режим доступа: http://technology.snauka.ru/2014/05/3484.
- Токарев, В.И. Бортовая информационная система мобильного погрузочного агрегата. / В.И. Токарев, И.А. Несмиянов, А.П. Евдокимов, Е.Н. Захаров // Стратегическое развитие АПК и сельских территорий РФ в современных международных условиях. Материалы Международной научно-практической конференции, посвящённой 70-летию Победы в Великой Отечественной войне 1941-1945 гг. – Волгоград: Изд-во ИПК ФГБОУ ВПО Волгоградский ГАУ «Нива», 2015. С. 94-98.
- Патент №2457172 РФ, МПК B66F9/06, G01C9/12, B66 F17/00. Система контроля положения контейнера на вилочном захвате/ И.А. Несмиянов, В.И. Токарев. – Опубл.27.07.2012.
- Патент на полезную модель № 140869 РФ, МПК B66F9/06, G01C9/12, B66 F17/00. Бортовая информационная система контроля положения погрузочного агрегата. / И.А. Несмиянов, В.И. Токарев, Е.Н. Захаров – Опубл. 20.05.2014 г.
Все статьи автора «Несмиянов Иван Алексеевич»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.