КАЛИБРОВКА МОДЕЛИ ДВИЖЕНИЯ МАРШРУТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ В ПРОГРАММЕ SUMO
1Пензенский государственный университет архитектуры и строительства, аспирант кафедры «Организация и безопасность движения»
2Пензенский государственный университет архитектуры и строительства, доцент кафедры «Организация и безопасность движения»
3Пензенский государственный университет архитектуры и строительства, студентка группы ОБД-51
Аннотация
В статье представлена методика моделирования движения транспорта общего пользования в программе SUMO. Приведены результаты натурных исследований динамики движения автобусов в городских условиях и времени обслуживания пассажиров на остановочных пунктах.
Ключевые слова: время обслуживания пассажиров, максимальная скорость, максимальное ускорение и замедление, моделирование, транспорт общего пользования
CALIBRATION OF MODEL OF MOVEMENT OF BUSES IN PROGRAM SUMO
1Penza State University of the Architecture and Building, graduate student of Department «Organization of Safety Road Traffic»
2Penza State University of the Architecture and Building, Associate Professor of Department «Organization of Safety Road Traffic»
3Penza State University of the Architecture and Building, student of group OBD-51
Abstract
In article the technique of buses movement modelling in program SUMO is presented. Results of natural researches of buses movement dynamics in city conditions and a holding time of passengers on stopping points are resulted.
Keywords: a holding time of passengers, Modelling, SUMO, the bus, the maximum acceleration and delay, the maximum speed
Рубрика: 05.00.00 ТЕХНИЧЕСКИЕ НАУКИ
Библиографическая ссылка на статью:
Скрипкин П.Б., Власов А.А., Касимова О.А. Калибровка модели движения маршрутных транспортных средств в программе SUMO // Современные научные исследования и инновации. 2015. № 6. Ч. 1 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2015/06/54770 (дата обращения: 12.07.2026).
Рост парка автотранспортных средств диктует необходимость использования имитационных моделей транспортных потоков как при разработке новых методов и алгоритмов управления, так и при решении задач планирования реконструкции улично-дорожной сети и организации дорожным движением.
В теории транспортных потоков различается три класса моделей, отличающихся уровнем детализации [1]. В макроскопических моделях основной задачей является установление состояния транспортного потока в пространстве плотность – скорость, значение которых определяется на уровне средних значений. Микроскопические модели моделируют движение отдельных транспортных средств на дороге, главным образом предполагая, что поведение транспортного средства зависит от двух факторов, физических способностей к перемещению транспортного средства и поведения водителя. Мезоскопическое моделирование расположено на границе между микроскопическими и макроскопическими моделированиями. Движение транспортного средства моделируется, используя аппроксимацию очереди и перемещения отдельных автомобилей между такими очередями.
В исследованиях методов организации движения и алгоритмов управления светофорными объектами стандартом де-факто стало использование микроскопических моделей.
В настоящее время имеются как коммерческие программные продукты (Aimsun, Vissim, CORSIM и др.), так и свободно распространяемые. Особый интерес представляет программа SUMO (Simulation of Urban MObility), разработанная в DLR [2] и имееющая статус открытой (open source) микроскопической среды моделирования дорожного движения. Несмотря на отсутствие графического редактора транспортной сети, и транспортного спроса, является прекрасным инструментом в исследовании дорожного движения благодаря своей гибкости и открытости. В SUMO при помощи пакета расширения TraCI могут быть реализованы новые подходы к управлению дорожным движением и выполнена оценка их эффективности. В отличие от коммерческих продуктов (Aimsun, Vissim, CORSIM и др.), модель SUMO встраивается в программу, написанную на языке программирования Python, и при этом исследователь получает полный контроль над процессом моделирования. Рассмотрим подробнее создание модели транспортной сети, на которой осуществляется движение маршрутных транспортных средств.
Структура модели SUMO. Имитационное моделирование в программе SUMO производится в форме сценариев, хранящихся в файле *.sumo.cfg (рисунок 1). Сценарий содержит описание сети в файле *.net.xml, транспортный спрос *.rou.xml и файлы дополнений, содержащий дополнительную информацию о моделировании *.add.xml.
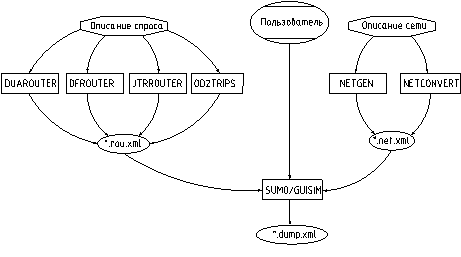
Рисунок 1 – Процесс моделирования в SUMO
В первом приближении транспортные сети SUMO представляют собой направленный граф, узлы (nodes) которого представляют собой пересечения (intersections/junctions), а связи (edges) – перегоны автомобильных дорог или городских улиц.
В SUMO отсутствует графический редактор сетей. Создание сети производится при помощи утилит NETCONVERT в режиме командной строки. NETCONVERT служит для преобразования транспортных сетей из форматов ГИС – Esri ArcView (*.shp), OpenStreetMap (*.osm.xml), а так же генерации сетей из файлов описания узлов (*.nod.xml) и связей (*.edg.xml).
Транспортный спрос в сценарии моделирования задается в файле *.rou.xml, содержащий описание типов транспортных средств (габариты, динамика и т.д.), время и место появления транспортного средства в сети, маршрут движения. Задание транспортного спроса производится на основе OD-матриц (OD2TRIPS), данных от детекторов транспорта (DFROUTER), случайного транспортного потока или долей поворотных потоков на пересечениях (DUAROUTER, JTRROUTER).
Для визуализации процесса моделирования используется графический интерфейс SUMOGUI (рисунок 2).
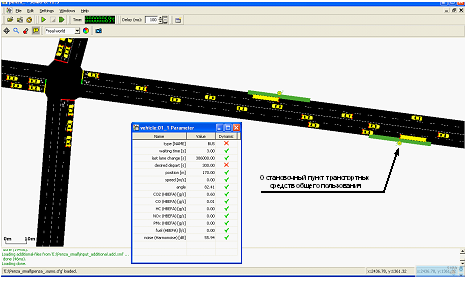
Рисунок 2 – Графический интерфейс среды моделирования SUMO
Особенностью моделирования транспорта общего пользования в SUMO является задание маршрутов движения, автобусных остановок и потока транспорта общего пользования в отдельном файле дополнений *.add.xml в следующем виде:
<additional>
<busStop id=”Nekrasova” lane=”3″ startPos=”70″ endPos=”100″ lines=”0″ />
<busStop id=”Pugacheva” lane=”2″ startPos=”70″ endPos=”100″ lines=”0″ />
<vtype id=” BUS” accel=”2.6″ decel=”4.5″ sigma=”0.5″ length=”15″ maxspeed=”50″/>
<vehicle id=”00_1″ type=”BUS” depart=”0″ color=”255,0,0″>
<route edges=”3 2 1 0 -2/>
<stop bus_stop=”Rembyttehnica” duration=”20″ />
<stop bus_stop=”Pugacheva” duration=”33″ />
</vehicle>
</additional>
Выполнение моделирования предусматривает выполнение следующих шагов:
– построение сети;
– построение транспортного спроса;
– калибровка модели;
– выполнение моделирования и получение необходимой информации.
Калибровка модели движения маршрутных транспортных средств. Для корректного моделирования движения маршрутных транспортных средств необходимо проведение натурных исследований их режимов движения [3, 4]:
– максимальное ускорение acell и замедление decell транспортных средств;
– максимальная желаемая скорость движения в свободных условий движения Vmax.
Для проведения исследований режимов работы МТС использовался видеорегистратор для автотранспорта «ОКО-Архив III Авто GPS». Видеорегистратор позволяет производить видеозапись с 1-4 телекамер во время движения или стоянки автомобиля на встроенный сменный жесткий диск. Устройство имеет встроенный GPS-приемник и внешнюю антенну, что позволяет записывать маршрут движения автомобиля, синхронизируя его с записью с видеокамер. Как правило, приёмником GPS навигационные сообщения посылаются автоматически с интервалом в 1 секунду, что позволяет подробно отслеживать движение МТС. Записанные GPS-треки можно сохранить в формате KML или NMEA 0183.

Рисунок 3 – Внешний вид «ОКО-Архив III Авто GPS»
Для оценки режимов движения МТС было проведено 17 заездов по проспекту Строителей г. Пензы на участке от ул. Стасова до ул. 8 Марта. Для расшифровки результатов исследований треки движения автомобилей сохранялись в текстовых файлах в формате NMEA-0183.
«NMEA 0183» («National Marine Electronics Association») – текстовый протокол связи морского (как правило, навигационного) оборудования между собой. Протокол NMEA так же используется производителями GPS приёмников.
Полный набор сообщения в NMEA 0183 и команд достаточно велик. Для решения задачи исследования движения МТС интерес представляет навигационное сообщение $GPVTG, в котором значение скорости объекта передается в км/ч. В приведенном ниже сообщении скорость транспортного средства составляла 50,75 км/ч:
$GPVTG,287.68,T,,M,27.39,N,50.75,K,A*36
Для разбора текстового файла, содержащего навигационные данные в формате NMEA 0183, разработана программа на языке Python. Программа производит поиск в файле регулярных выражений вида ‘N,(.*),K’, содержащее значение скорости и сохраняющий результаты скорости транспортного средства в файл для последующего анализа.
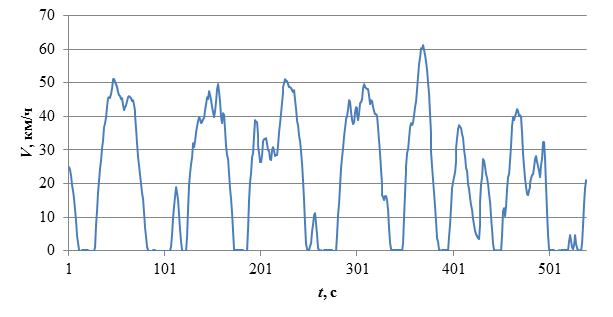
Рисунок 4 – График скорости движения МТС на маршруте движения
С учетом дискретности получения навигационного сигнала, равной 1 с, ускорение транспортных средств an может быть вычислено по следующей формуле:
 ;
;
где Vn – текущая скорость, км/ч; Vn-1 – скорость движения на предыдущем шаге, км/ч.
Пример расчета ускорений движения маршрутных транспортных средств приведен на рисунке 4. Результаты обработки проведенных исследований приведены в таблице 1.
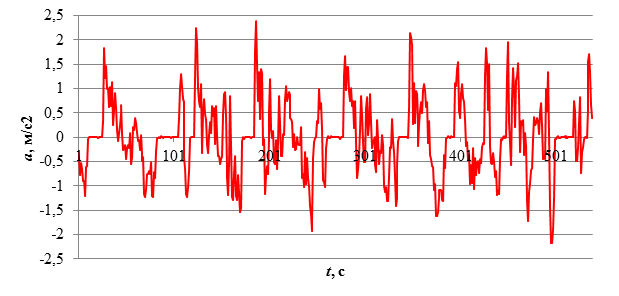
Рисунок 4 – График ускорений маршрутных транспотных средств на маршруте движения
Таблица 1 – Результаты исследований режимов движения маршрутных транспортных средств на маршрутах движения
Время нахождение маршрутного транспортного средства на остановочном пункте определяется временем, которое затрачивается на ожидание в очереди на посадку пассажиров t1, чистого времени обслуживания пассажиров t2 (время на вход и выход пассажиров), на открытие и закрытие дверей t3, а так же времени отъезда с остановочного пункта t4. Для модели SUMO значимым является сумма чистого времени обслуживания пассажиров и время на открытие / закрытие дверей:
 .
.
На остановочных пунктах г. Пензы проведены натурные исследования времени tobs. Математическое ожидание времени нахождения маршрутного транспортного средства составило 13,35с при дисперсии 41,28.
Выполненный подбор функции плотности распределения показал, что в лучшей степени наблюдаемые данные описываются логнормальным законом распределения (рисунок 5).
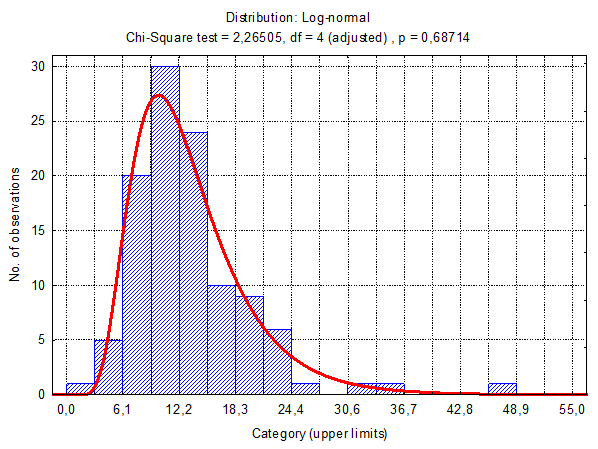
Рисунок 5. Функция плотности распределения времени нахождения маршрутного транспортного средства на остановочном пункте
Натурные исследования режимов движения маршрутных транспортных средств позволили получить максимальные значения и дисперсию скорости движения, ускорения и замедления необходимые для моделирования динамики движения. Полученные значения времени нахождения маршрутных транспортных средств на остановочных пунктах позволяют адекватно воспроизвести процесс обслуживания пассажиров.
В дальнейшем полученные параметры будут использованы для моделирования работы и оценки эффективности методов предоставления приоритета маршрутным транспортным средствам, описанных в работе [5].
Библиографический список
- Власов А.А. Адаптивные системы управления дорожным движением в городах/А.А. Власов: монография. - Пенза: Изд-во ПГУАС, 2012. -162 с.
- Recent Development and Applications of SUMO -Simulation of Urban MObility/Daniel Krajzewicz, Jakob Erdmann, Michael Behrisch, and Laura Bieker.//International Journal On Advances in Systems and Measurements, -2012. -5 (3&4). -p. 128-138.
- Власов А.А. Использование программы микроскопического моделирования SUMO для оценки эффективности алгоритмов управления транспортными потоками / Власов А.А., Орлов Н.А., Чушкина Ж.А. // Современная техника и технологии. -2014. -№ 9 . -URL: http://technology.snauka.ru/2014/09/4418(дата обращения: 29.10.2014).
- Горелов А.М. Калибровка микроскопических моделей в задачах управления транспортными системами городов / Горелов А.М., Орлов Н.А., Власов А.А. // Региональная архитектура и строительство. 2014. № 1. С. 175-180.
- Скрипкин П.Б. Предоставления приоритета в движении транспорту общего пользования в автоматизированных системах управления движением / Скрипкин П.Б., Власов А.А. // Современные научные исследования и инновации. 2014. № 12-1 (44). С. 114-118.
Все статьи автора «Власов Алексей Александрович»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.