ЛОКАЛЬНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
ФГБОУ ВПО «Череповецкий государственный университет»
Аннотация
В статье рассматриваются локальные системы управления непрерывной разливки стали. Рассмотрены два вида теплового режима разливки стали, стабилизации перепада температур охлаждающей воды на выходе и входе в кристаллизатор и режим связанный с использованием соотношения: перепад температур – расход охлаждающей воды.
Ключевые слова: локальные системы управления, непрерывная разливка стали, разливка стали
LOCAL CONTROL SYSTEMS
Cherepovets State University
Abstract
The article deals with local control of continuous casting of steel. Two types of thermal conditions casting, stabilizing the temperature difference of the cooling water outlet and inlet to the crystallizer and connected mode using the relation: temperature difference - cooling water flow.
Рубрика: 05.00.00 ТЕХНИЧЕСКИЕ НАУКИ
Библиографическая ссылка на статью:
Шмиг Д.Н. Локальные системы управления // Современные научные исследования и инновации. 2015. № 12 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2015/12/60477 (дата обращения: 31.07.2026).
Уровень металла в кристаллизаторе. В зависимости от изменения положения уровня металла в кристаллизаторе меняется число импульсов, поступающих на галогенный счетчик от источника радиоактивного излучения, и измерительный преобразователь 1 формирует аналоговый сигнал, пропорциональный величине уровня, поступающий в Ремиконт 2, управляющий с помощью исполнительного механизма стопором или шиберным затвором промежуточного ковша и поддерживающий заданное значение уровня ho.
Требования к управлению уровнем:
уровень металла в кристаллизаторе должен быть надежно стабилизирован с возможно меньшими значениями подачи регулирования (площадь, ограниченная кривой переходного процесса) без статической ошибки или со статической ошибкой, не превышающей ± 20 мм;
затухание переходных процессов должно быть достаточно интенсивным;
динамические отклонения стопора или шиберного затвора от установившегося значения должны быть минимизированы (при соблюдении первого условия) с целью минимизации “пульсации” струи металла. Перерыва струи металла, подаваемого в кристаллизатор, быть не должно .
Выполнить перечисленные требования возможно при реализации
в Ремиконте П-, ПИ- или ПИД- законов регулирования и минимизации в процессе управления функционала вида:
гдe ε – отклонение уровня от заданного значения в процессе регулирования; у – управляющее воздействие, поступающее от Ремиконта на стопор или шиберный затвор: m – весовой коэффициент.
Для увеличения динамической точности системы при наличии возмущения по скорости вытягивания слитка возможно применить комбинированную систему управления, использующую принципы управления по отклонению и возмущению. Для этого вводят прибор (тахогенератор) 3, измеряющий скорость вытягивания слитка В Ремиконтс вырабатывается корректирующее управляющее воздействие таким образом, что изменение скорости вытягивания слитка сразу компенсируется изменением притока металла из промежуточного ковша. При этом уровень металла в кристаллизаторе становится независимым (инвариантным) от возмущения по скорости вытягивания слитка.
Изображение выходной величины (уровня металла в кристаллизаторе) h(р) может быть найдено по выражению

где Wоб(р) - передаточная функция объекта по каналу управления, равная Коб/р ; Wобзz(р) -передаточная функция объекта по каналу возмущения, равная 1/р ; Wp(р) -передаточная функция ПИ- закона регулирования с коэффициентом kpи постоянной интегрирования ТH, равная kp(ТHр+1)/ ТHр; Wизм(р)-передаточная функция устройства, измеряющего уровень металла, равная kизм(Тизмр+1);WИ.П.(р)- передаточная функция инвариантного преобразования.
Исходя из данного уравнения, инвариантность (независимость) выходной величины от возмущаемого воздействия получается при Wобзz(р)-Wоб(р)Wp(р)WИ.П.(р) =0, откуда
Применительно к рассматриваемому Пропорционально Иинтегральному – закону регулирования передаточная функция инвариантного преобразования в Ремиконте имеет следующий вид:
т.е. соответствует передаточной функции дифференциатора.
При дозаторной (без стопора) подаче металла в кристаллизатор управление уровнем металла может осуществляться только изменением скорости вытягивания слитка.
Это же управляющее воздействие применяется и при литье сортовых заготовок малого сечения (когда необходимо иметь хорошее стабильное качество струи) и при отливке достаточно крупных заготовок в качестве дополнительного.
Тепловой режим кристаллизатора.
Управление тепловым режимом кристаллизатора обычно заключается в стабилизации перепада температур охлаждающей воды на выходе и входе в кристаллизатор (датчик 1) путем изменения расхода воды с помощью ПИ регулятора 3 (рис.1). Этот перепад задается максимально возможным по условиям отложения солей в кристаллизаторе с тем, чтобы обеспечить минимальный расход охлаждаемой воды. Так как температура воды на входе в кристаллизатор может меняться достаточно значительно, то применяется автоматическая коррекция с помощью устройства 4 задания регулятору 3 в сторону уменьшения при повышении температуры воды в магистрали и в сторону увеличения при уменьшении температуры воды (5 – задатчик расчетного значения температуры воды на входе).
Второй вариант управления тепловым режимом кристаллизатора связан с использованием соотношения: перепад температур – расход охлаждающей воды (рис.2.). Перепад температур с датчика 1 и заданное значение этого перепада с задатчика 2 поступают в регулятор 3, куда поступает сигнал от датчика расхода охлаждающей воды.
Когда температурный перепад отклоняется от заданного значениярегулятор соотношения (3) воздействует на клапан подачи охлаждающей воды в направлении ликвидации данного отклонения, но не до нуля,а до некоторой величины, определяемой встречным сигналом от расходомера 4. Основным преимуществом данной системы управления является незначительная чувствительность к возмущениям по расходу воды. В случае изменения
подачи воды, связанного, например, с изменением давления в трубопроводе, регулятор соотношения быстро восстанавливает нужный расход воды и при этом перепад температуры практически не изменяется.
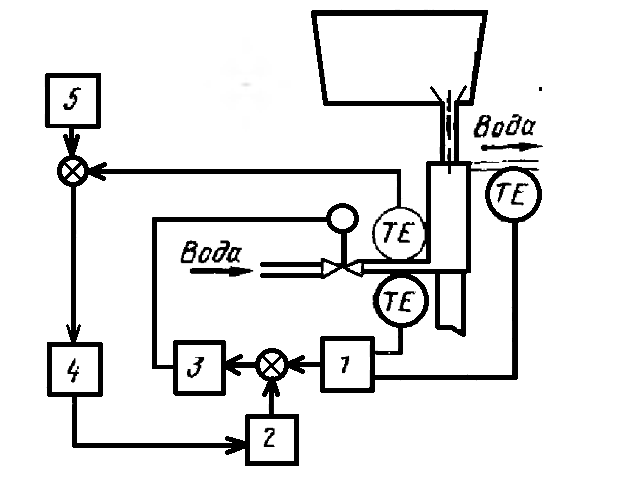
Рисунок 1. Система управления тепловым режимом кристаллизатора с коррекцией по температуре охлаждающей воды.
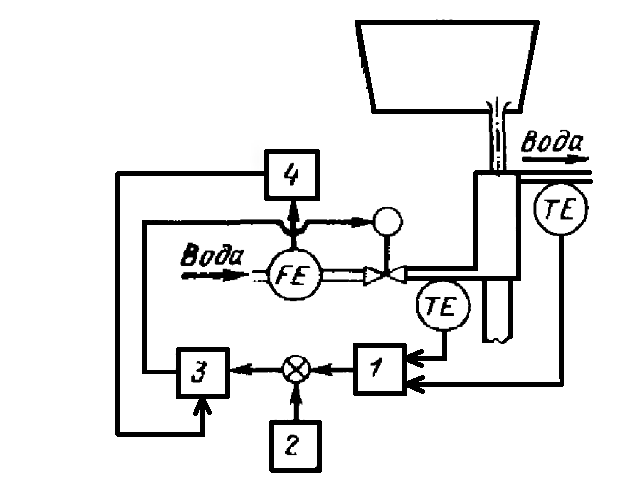
Рисунок 2. Система управления тепловым режимом кристаллизатора по соотношению: перепад температур – расход охлаждающей воды.
На МНЛЗ с маломеняющейся скоростью разливки можно просто стабилизировать расход охлаждающей воды, контролируя при этом разность температур воды на входе и выходе кристаллизатора Если перепад температур станет больше или меньше наиболее целесообразного, то оператор меняет вручную задание регулятору расхода воды. Безусловно, в современных условиях схемы pис.1 и рис.2 могут быть реализованы на регулирующих микропроцессорных контроллерах, в том числе на том же Ремиконте, что и регулирование уровня металла в кристаллизаторе.
Библиографический список
- «АСУТП в чёрной металлургии» Глинков Г.М., Маковский В.А. 1999 г 310 с.
- Исследование систем автоматического управления: Методические указания к лабораторным работам по дисциплине "Электромеханические системы" / Сост.: С.Н. Гайдучок, Н.В. Соловьев. СПб.: Изд-во СПбГЭТУ "ЛЭТИ", 2000. 32 с., илл.
- проф. Терехов В.А. "Методические указания к курсовому проекту по дисциплине "Локальные Системы Управления", Санкт-Петербург, 2002 - 27 с., илл
- Методы классической и современной теории автоматического управления. Учебник в 3-х томах / Под ред. Н.Д. Егупова. — М.: Изд-во МГТУ им. Баумана, 2000.
- Мирошник, И.В. Теория автоматического управления. Линейные системы (Серия: «Учебное пособие»). – СПб.: Питер, 2005. — 336 с.
- Попов, Е.П., Бесекерский, В.А.,. Теория систем автоматического управления / Е.П. Попов, В.А. Бесекерский. – Изд. 4-е, перераб. и доп. – Спб.: Изд-во «Профессия», 2003. – 752 с.
- http://www.nefteavtomatika.ru/local_control_system
- http://wwwcdl.bmstu.ru/mt10/UTS/frames3.html
Все статьи автора «Шмиг Дмитрий Николаевич»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.