Во многих случаях характер воздействия на системы автоматического регулирования бывает таким, что его нельзя считать определенной функцией времени. Оно может принимать с течением времени самые разнообразные случайные значения. В таких случаях можно оценить только вероятность появления той или иной формы воздействия в тот или иной момент времени [2]. Это происходит не потому, что оно неизвестно заранее, а потому, что сама природа реального задающего или возмущающего воздействия такова, что величина его в каждый момент времени и процесс его изменения с течением времени зависят от множества разнообразных величин, которые случайным образом могут комбинироваться друг с другом, появляться одновременно или с любым сдвигом во времени и т. д.
Рассмотрим нестационарный объект управления, динамические процессы которого описываются уравнениями (1) с относительной степенью передаточной функции n-m=1.
![]() (1)
(1)
где ![]() – вектор переменных состояния;
– вектор переменных состояния; ![]() – вектор выхода объекта;
– вектор выхода объекта; ![]() – обобщенный выход объекта, формируемый с помощью линейного компенсатора
– обобщенный выход объекта, формируемый с помощью линейного компенсатора ![]() ;
; ![]() – управление;
– управление; – нестационарная квадратная матрица состояния размерности
![]() ;
; – нестационарный вектор размерности
![]() ;
; – матрица выхода размерности
![]() ;
; ![]() – случайная вектор-функция внешних возмущений или помех, относительная степень объекта (n-m)=1.
– случайная вектор-функция внешних возмущений или помех, относительная степень объекта (n-m)=1.
На объект (1) действует случайное воздействие в виде гауссовского процесса. Его многомерная функция распределения, для совокупности значений ![]() определяется выражением
определяется выражением
 ,
,
где ![]() - среднее значение и дисперсия процесса в момент времени
- среднее значение и дисперсия процесса в момент времени ![]() ,
, ![]() - определитель n-го порядка корреляционной матрицы,
- определитель n-го порядка корреляционной матрицы, ![]() - алгебраическое дополнение элемента
- алгебраическое дополнение элемента
 .
.
Желаемое поведение объекта управления (1) задается с помощью явно-неявной эталонной модели:
![]() , (2)
, (2)
где ![]() – вектор выхода эталонной модели (ЭМ);
– вектор выхода эталонной модели (ЭМ); ![]() – обобщенный выход ЭМ;
– обобщенный выход ЭМ; ![]() – линейный компенсатор;
– линейный компенсатор; ![]() – скалярное задающее воздействие;
– скалярное задающее воздействие; ![]() – стационарная квадратная матрица состояния размерности
– стационарная квадратная матрица состояния размерности ![]() , причем
, причем ![]() является гурвицевой;
является гурвицевой; ![]() – стационарный вектор размерности
– стационарный вектор размерности ![]() .
.
Будем считать, что выполнены условия структурного согласования между объектом (1) и эталоном вида (2):
![]() , (3)
, (3)
где ![]() – нестационарный вектор, ограниченный по норме;
– нестационарный вектор, ограниченный по норме; ![]() – скалярная функция времени.
– скалярная функция времени.
Требуется построить робастную систему управления с явно-неявной эталонной моделью (2) таким образом, чтобы при любом наборе ![]() , при любых начальных условиях
, при любых начальных условиях ![]() и ограниченных возмущениях выполнялось целевое условие:
и ограниченных возмущениях выполнялось целевое условие:
 (4)
(4)
где ![]() – некоторые относительные малые числа.
– некоторые относительные малые числа.
Матрица ![]() является гурвицевой, т.е. ее собственные значения удовлетворяют соотношению:
является гурвицевой, т.е. ее собственные значения удовлетворяют соотношению:
![]() (5)
(5)
В таком случае передаточную функцию W(s) можно преобразовать с учетом соотношения (5) к виду:
![]() .
.
Тогда необходимо и достаточно вектор ![]() выбрать таким образом, чтобы полином
выбрать таким образом, чтобы полином ![]() был гурвицевым степени
был гурвицевым степени ![]() с положительными коэффициентами, что гарантировало бы выполнение условия
с положительными коэффициентами, что гарантировало бы выполнение условия ![]() ,
, ![]() .
.
Рассмотрим модификацию интегрального неравенства Попова (МИНП)
![]() (6)
(6)
где ![]() – положительно определенные функции; hi*(0,t), i =1, 2, 3, 4 – модифицированные интегральные слагаемые вида:
– положительно определенные функции; hi*(0,t), i =1, 2, 3, 4 – модифицированные интегральные слагаемые вида:
![]() (7)
(7)
![]() (8)
(8)
![]() (9)
(9)
![]() (10)
(10)
где ![]() – корреляционная функция гауссовского случайного процесса,
– корреляционная функция гауссовского случайного процесса, ![]() - дисперсия процесса,
- дисперсия процесса, ![]() определяет корреляцию (статистическую зависимость) соседних чисел.
определяет корреляцию (статистическую зависимость) соседних чисел.
Оценки для интегралов (7), (8) и (10) имеют вид:
 (11)
(11)
 (12)
(12)
 (13)
(13)
где введены следующие постоянные коэффициенты ![]() ;
; ![]() ;
; ![]() .
.
![]() – оценка спектральной плотности
– оценка спектральной плотности ![]() случайной функции f(t). Данная формула называется формулой Винера-Хинчина.
случайной функции f(t). Данная формула называется формулой Винера-Хинчина.
Явный вид закона управления описывается следующей формулой
![]() (14)
(14)
Структурная схема робастной системы управления (1), (2), (3), (14) представлена на рисунке 1.
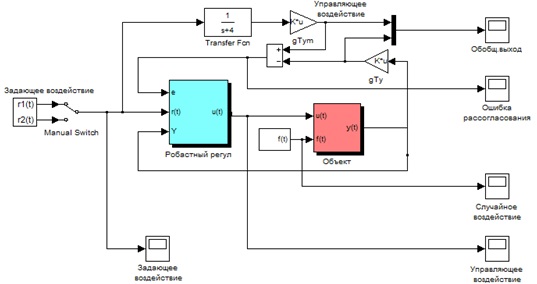
Рисунок 1 – Структурная схема робастной системы управления
нестационарным объектом с действием случайной помехи с ЯНЭМ
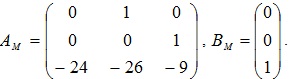
Проведем имитационное моделирование системы нелинейного робастного управления нестационарным объектом с действием случайной помехи с ЯНЭМ. Рассмотрим систему, описываемую уравнениями (1), (3), (14), в которой параметры объекта управления и эталонной модели (2) в векторно-матричной форме имеют значения

Коэффициенты объекта изменяются по законам:
![]()
Определим спектральную плотность ![]() гауссовского случайного процесса по формуле
гауссовского случайного процесса по формуле
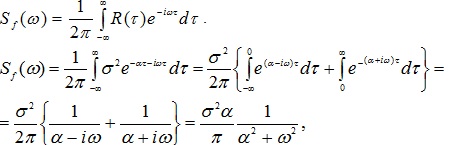
то есть в этом случае ![]()
![]()
Эталонная модель задана в виде:
Синтез системы с явно-неявной эталонной моделью связан с выбором компонент вектора g для обеспечения условия положительности ЛСЧ вида:
![]()
согласно которой были получены компоненты вектора ![]() .
.
Нестационарные параметров объекта управления заданы в виде:

Задающие воздействия были сформированы следующим образом:
![]()
Параметры робастного регулятора (16) заданы как:
![]()
Имитационное моделирование осуществляется при помощи входящего в состав математического пакета MATLAB средства визуального моделирования SIMULINK.
Случайное воздействие реализовано с помощью блока Random Number (рисунок 2).
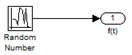 Рисунок 2 – Реализация случайного воздействия
Рисунок 2 – Реализация случайного воздействия
с помощью блока Random Number
Структурная схема нестационарного объекта представлена на рисунке 3.
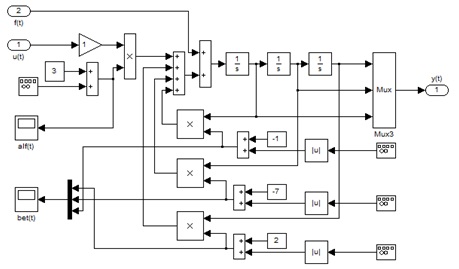 Рисунок 3 – Реализация нестационарного объекта
Рисунок 3 – Реализация нестационарного объекта
Структурная схема робастного регулятора представлена на рисунке 4.
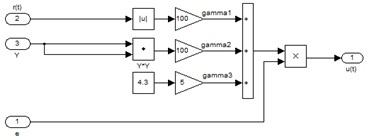 Рисунок 4 – Реализация робастного регулятора
Рисунок 4 – Реализация робастного регулятора
Разработанная система представляет собой пакет программ, состоящий из следующих m-файлов.
Файл interfeis.m – файл запуска системы. Данный файл запускает программу и предлагает пользователю осуществить выбор необходимого случайного воздействия (рисунок 5).
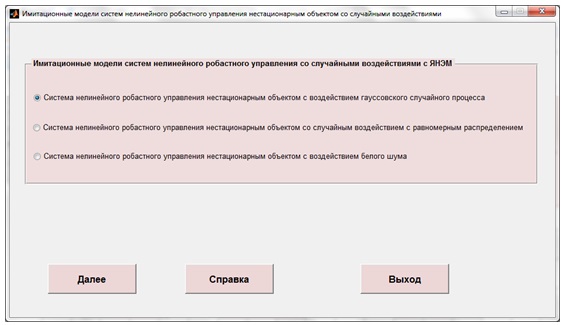 Рисунок 5 – Главное окно программы
Рисунок 5 – Главное окно программы
Для каждой из моделируемых систем внешний вид окна будет отличаться лишь заголовком окна и набором параметров модели. Внешний вид окна управления моделированием показан на рисунке 6.
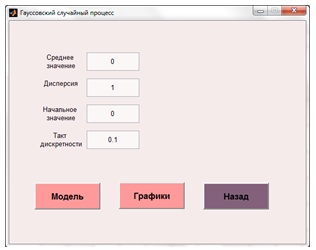 Рисунок 6 – Окно управления моделированием
Рисунок 6 – Окно управления моделированием
Файл help.m – запускает окно, содержащее всю справочную информацию, доступную пользователю.
Результаты проведенного имитационного моделирования представлены на рисунках 7, 8, 9.
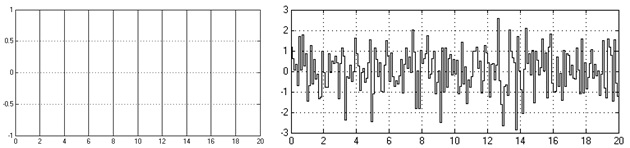 Рисунок 7 – Задающее и случайное воздействия
Рисунок 7 – Задающее и случайное воздействия
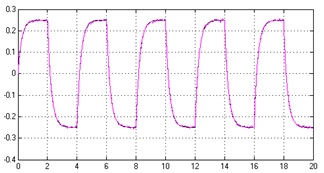
Рисунок 8 –Выходы объекта и эталона для системы
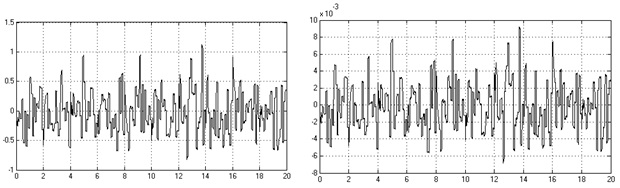
Рисунок 9 – Управление и ошибка рассогласования для системы
Библиографический список
- Борисевич, А.В. Теория автоматического управления: элементарное введение с применением MATLAB / А.В. Борисевич. – СПб.: Политехнический ун-т, 2011. – 200 с.
- Бесекерский, В.А. Теория систем автоматического управления / В.А. Бесекерский, Е.П. Попов. – 4-е изд., перераб. и доп. – СПб.: Профессия, 2003. – 752 с.
- Гмурман, В.Е. Теория вероятностей и математическая статистика: учеб. пособие / В.Е. Гмурман. – 9-е изд., перераб. и доп. – М.: Высшая школа, 2003. – 479 с.
- Еремин, Е.Л. Нелинейное робастное управление сложными динамическими объектами / Е.Л. Еремин, Н.В. Кван, Н.П Семичевская, Д.А. Теличенко. – Благовещенск: Амурский гос. ун-т, 2011. – 204 с.