РАЗРАБОТКА И ОПТИМИЗАЦИЯ АЛГОРИТМИЧЕСКОГО И ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ НЕЙРОПРОЦЕССОРНОЙ СИСТЕМЫ МАТРИЧНЫХ ВЫЧИСЛЕНИЙ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ И КОЭФФИЦИЕНТОВ РЕГУЛЯТОРОВ ДВИГАТЕЛЕЙ НОГ НА ПРИМЕРЕ ГЕКСАПОДА
Рязанский государственный университет имени С.А.Есенина
кандидат технических наук, доцент кафедры информатики и вычислительной техники
Аннотация
Описана разработка алгоритмического и программного обеспечения специализированной вычислительной системы на базе нейропроцессоров. Рассматриваются алгоритмы матричных вычислений управляющих воздействий, коэффициентов регуляторов двигателей ног на примере гексапода и вычисления задаваемых и измеряемых перемещений. Практические исследования производились с использованием нейропроцессора NM6406 на базе инструментального модуля MC 51.03 и микрокомпьютера MB 77.07, разрабатываемых НТЦ "Модуль".
Ключевые слова: гексапод, матричные вычисления, нейропроцессорная вычислительная система, управление
DEVELOPMENT AND OPTIMIZATION OF ALGORITHMS AND SOFTWARE SYSTEMS NEUROPROCESSOR MATRIX CALCULATIONS OF CONTROL ACTIONS AND COEFFICIENTS ENGINE CONTROLLER UPSIDE EXAMPLE HEXAPOD
Ryazan State University named S.Esenin
PhD, Associate Professor of CS and Engineering
Abstract
Describes the development of algorithms and software specialized computing system based on neuroprocessors. We consider algorithms for matrix computations of control actions, coefficients engine controller upside example hexapod and calculations defined and measured displacements. Empirical studies were carried out using neural NM6406-based tool module and a microcomputer MC 51.03 MB 77.07, developed by RC "Module".
Рубрика: 05.00.00 ТЕХНИЧЕСКИЕ НАУКИ
Библиографическая ссылка на статью:
Романчук В.А. Разработка и оптимизация алгоритмического и программного обеспечения нейропроцессорной системы матричных вычислений управляющих воздействий и коэффициентов регуляторов двигателей ног на примере гексапода // Современные научные исследования и инновации. 2015. № 3. Ч. 1 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2015/03/49244 (дата обращения: 30.07.2026).
Исходными данными для разработки алгоритмического и программного обеспечения являются:
-
описание цифровых сигналов датчиков;
-
описание алгоритмов формирования управляющих сигналов;
-
математическая модель, реализованная в виде модели модуля SIMULINK программного комплекса MATLAB.
Исходными данными разработанных алгоритмов являются:
-
описание сигналов датчиков, полученных посредством преобразования аналоговых сигналов с гексапода в цифровой вид с помощью аналогово-цифрового преобразователя.
Выходными данными разработанных алгоритмов являются:
- управляющие сигналы, преобразуемые в аналоговое представление посредством использования цифро-аналогового преобразователя;
- информационные сигналы вспомогательного и служебного характера.
Для реализации алгоритмов была выбрана аппаратная база: нейропроцессорные устройства на базе процессоров особого класса, 6-го поколения, широко используемые в настоящее время в военной и космической промышленности. Было выбрано семейство процессоров NeuroMatrix 640x, нейропроцессоры которого выпускаются научно-техническим центром “Модуль” (г.Москва) [3].
Выбор конкретных нейропроцессорных устройств предопределен заказчиком и преимуществами использования нейропроцессорных технологий [2]:
- высокий уровень распараллеливания (близкий к 100%);
- высокая энергоэффективность (меньше в тысячи раз относительно процессоров архитектуры фон-Неймана).
Практические исследования производились с использованием нейропроцессора NM6406 на базе инструментального модуля MC 51.03 и микрокомпьютера MB 77.07. Эффективное распараллеливание вычислений достигается за счет аппаратной поддержки операции векторно-матричного умножения на нейропроцессоре NeuroMatrix NM6406. Все арифметические вычисления, относящиеся непосредственно к вычислению управляющих воздействий, производятся на векторном сопроцессоре. Так как векторный узел позволяет оперировать данными переменной разрядности, то для хранения входных данных и результатов вычислений удобно отводить по 32 разряда на целую и вещественную часть.
Для разработки алгоритмов и программного кода были реализованы подпрограммы следующих функциональных элементов математической модели специализированного вычислительного устройства (СВУ) управления гексаподом [7].
1. Матричный умножитель и матричный умножитель с накоплением.
Дифференциальные уравнения, описывающие динамику гексапода, могут быть представлены в виде разностных в векторно-матричной форме, которые удобны для реализации средствами вычислительной техники. Поэтому основная операция, которую должен выполнять СВУ – перемножение матриц, которые могут быть разбиты на пару элементарных операций «умножение – сложение» (умножение с накоплением). Для этой операции используется векторный сопроцессор, который представляет собой общий матричный узел для выполнения операций умножения с накоплением арифметических и логических операций, маскирования, функций активации над векторами и матрицами.
Это основной функциональный элемент с набором регистров общего назначения. Представляет собой матричную структуру 64х64, произвольно разделенную на столбцы и строки.
Структурная схема векторного сопроцессора приведена на рисунке 1.
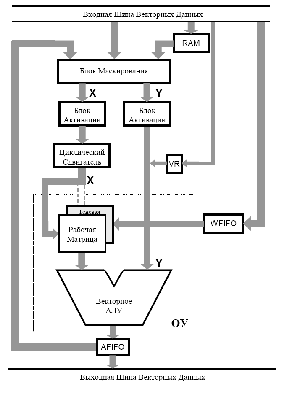
Рисунок 1. Структура векторного сопроцессора
Операция умножения с накоплением выполняется в рабочей матрице нейропроцессора:
 ,
,
где
 – элемент данных, поступающих на вход векторного сопроцессора;
– элемент данных, поступающих на вход векторного сопроцессора;
 – частичная сумма, накопленная на предыдущем этапе взвешенного суммирования или остаток после предыдущей операции;
– частичная сумма, накопленная на предыдущем этапе взвешенного суммирования или остаток после предыдущей операции;
 – элемент входного вектора данных;
– элемент входного вектора данных;
 – весовой коэффициент, расположенный в соответствующей ячейке рабочей матрицы процессора;
– весовой коэффициент, расположенный в соответствующей ячейке рабочей матрицы процессора;
 – количество столбцов рабочей матрицы процессора;
– количество столбцов рабочей матрицы процессора;
 – количество строк рабочей матрицы процессора.
– количество строк рабочей матрицы процессора.
Рабочая матрица имеет 2 входа:
 - 64 разряда;
- 64 разряда;
 .
.
Данные, полученные на входе  умножаются на ячейки матрицы, после чего они суммируются в пределах столбца, то есть в случае переполнения происходит потеря знаковых разрядом. Данные со входа
умножаются на ячейки матрицы, после чего они суммируются в пределах столбца, то есть в случае переполнения происходит потеря знаковых разрядом. Данные со входа  поэлементно складываются с результатами умножения, выполненным над данными входа
поэлементно складываются с результатами умножения, выполненным над данными входа  .
.
Для выполнения операции взвешенного суммирования в рабочую матрицу предварительно загружаются весовые коэффициенты  . Это возможно двумя способами – либо непосредственно в рабочую матрицу, либо через теневую матрицу. Загрузка весовых коэффициентов через теневую матрицу наиболее эффективен, так как загрузка реализуется за один такт нейропроцессора. Теневая матрица существует в векторном узле нейропроцессора для ускорения работы, так как весовые коэффициенты загружаются в фоновом режиме за 32 такта. Перегрузка весовых коэффициентов из теневой в рабочую матрицу происходит за один такт.
. Это возможно двумя способами – либо непосредственно в рабочую матрицу, либо через теневую матрицу. Загрузка весовых коэффициентов через теневую матрицу наиболее эффективен, так как загрузка реализуется за один такт нейропроцессора. Теневая матрица существует в векторном узле нейропроцессора для ускорения работы, так как весовые коэффициенты загружаются в фоновом режиме за 32 такта. Перегрузка весовых коэффициентов из теневой в рабочую матрицу происходит за один такт.
Разбиение матрицы на строки определяется рабочим регистром  . Он определяет предварительное разбиение 64-разрядных слов входных данных, поступающих на вход
. Он определяет предварительное разбиение 64-разрядных слов входных данных, поступающих на вход  . Разбиение рабочей матрицы на столбцы задаётся рабочим регистром
. Разбиение рабочей матрицы на столбцы задаётся рабочим регистром  . Этот же регистр определяет разбиение 64-разрядных данных на входе
. Этот же регистр определяет разбиение 64-разрядных данных на входе  и также предварительно заносится в виде слова данных в регистр. Этот же регистр определяет разрядность результатов вычисления, которые в итоге будут расположены в буферном регистре AFIFO. Таким образом, входные данные (операнды) и выходные значения упаковываются путем разбиения в 64-разрядные слова. Все операции в матрице производятся параллельно за 1 такт.
и также предварительно заносится в виде слова данных в регистр. Этот же регистр определяет разрядность результатов вычисления, которые в итоге будут расположены в буферном регистре AFIFO. Таким образом, входные данные (операнды) и выходные значения упаковываются путем разбиения в 64-разрядные слова. Все операции в матрице производятся параллельно за 1 такт.
2. Сумматор двух и более операндов.
Сумматор двух и более операндов реализован с использованием векторного блока процессора и операции взвешенного суммирования (рисунок 1) с пустым оператором умножения, то есть с “единичной” теневой и рабочей матрицей (все биты 64×32 заполнены единичными битами). Эффективность использования этой операции зависит от разрядности входных данных, так как за счет использования разбиения матрицы на строки и столбцы увеличивается скорость вычислений в связи с одновременной работой с несколькими операндами. Важной особенностью векторного процессора является реализация работы с операндами различной длины.
3. Интегратор значений.
Для реализации операции интегрирования используются вычислительные методы, цель которых заменить операцию интегрирования на комплекс операций вида “сложение – умножение”. Алгоритма работы СВУ представлен на рисунке 2.
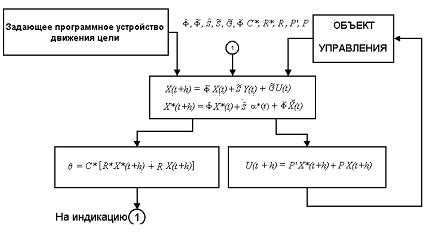
Рисунок 2. Алгоритм функционирования СВУ
На схеме приняты следующие обозначения: 
 — рабочие матрицы, полученные из матриц параметров гексапода и матриц параметров корректирующих фильтров;
— рабочие матрицы, полученные из матриц параметров гексапода и матриц параметров корректирующих фильтров;
 ,
, — матрицы параметров корректирующих связей (6×100);
— матрицы параметров корректирующих связей (6×100);
 — вектор-функция программы (18×1);
— вектор-функция программы (18×1);
 - вектор-функция наблюдения (сигналы, поступающие от измерительной системы) (30×1);
- вектор-функция наблюдения (сигналы, поступающие от измерительной системы) (30×1);
 ,
,  - вектор-функция текущего и программного состояния системы на i-м шаге управления (100×1);
- вектор-функция текущего и программного состояния системы на i-м шаге управления (100×1);
 ,
,  - то же на (
- то же на ( +1)-м шаге (100×1);
+1)-м шаге (100×1);
 и
и  - вектор управляющих воздействий на
- вектор управляющих воздействий на  -м и (
-м и ( + 1)-м шагах управления (30×1);
+ 1)-м шагах управления (30×1);
 - шаг интегрирования (~0.001) ;
- шаг интегрирования (~0.001) ;
 - значение отклонения фокальной оси гексапода от линии визирования объекта(3×1);
- значение отклонения фокальной оси гексапода от линии визирования объекта(3×1);
С*, R*, R — постоянные матрицы размерностью (3×3, 3×100, 3×100).
Из алгоритма управления гексаподом следует, что основной процедурой в СВУ является процедура умножения матрицы на вектор:
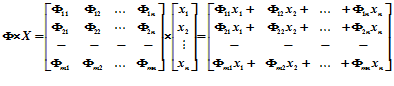
Одна компонента вектора результата получается суммированием произведения элементов строки матрицы на соответствующие элементы вектора - столбца. Эта последовательность операции повторяется столько раз, сколько строк в матрице. Для вычисления произведения матрицы на вектор необходимо выполнять  операций умножения, где
операций умножения, где  - число строк матрицы;
- число строк матрицы;  - число столбцов и
- число столбцов и  в операций сложения, определяемых по формуле:
в операций сложения, определяемых по формуле:  операций сложения, или около 3000 пар операций “умножение - сложение”.
операций сложения, или около 3000 пар операций “умножение - сложение”.
4. Функции активации (насыщения).
Функции активации реализованы с использованием векторного блока процессора и операции взвешенного суммирования (рисунок 1). Реализованы подпрограммы двух типов функций активации: пороговая функция и функция насыщения. В блоках активации осуществляются вычисления над упакованными словами данных. Блоки активации позволяют применять функции активации ко всем элементам упакованного слова одновременно. Основную роль в управлении функциями активации играют регистры  и
и  . Блоки активации размещаются между устройством маскирования и рабочей матрицей или векторным вычислителем. Функции активации могут быть подвергнуты либо данные, поступающие на вход
. Блоки активации размещаются между устройством маскирования и рабочей матрицей или векторным вычислителем. Функции активации могут быть подвергнуты либо данные, поступающие на вход  , либо на
, либо на  , либо на оба входа сразу.
, либо на оба входа сразу.
Пороговая активация реализована следующим образом.
Если значения битов данных, соответствующих битам “1″ регистра  :
:
- равны, то поле данных не изменяется при обработке арифметической функцией активации (функцией насыщения);
- не равны и старший бит равен “0″, то значение заменяется на положительное пороговое;
- не равны и старший бит равен “1″, то значение заменяется на отрицательное пороговое.
Функция насыщения переводит неотрицательные значения элементов полей данных в “0″, отрицательные в “-1″.
Элементарные базовые операторы реализованы в виде макросов на языке нейроассемблера.
Результаты моделирования и анализа реализации программного кода СВУ на нейропроцессорной системе представлены на рисунке 3 [5,6].
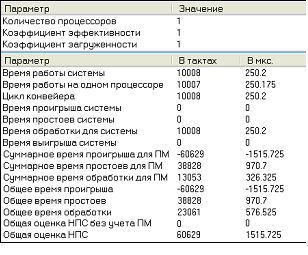
Рисунок 3. Результаты моделирования программного кода СВУ
Заключение.
В статье предложены специализированные алгоритмы матричных вычислений управляющих воздействий, коэффициентов регуляторов двигателей ног на примере гексапода и вычисления задаваемых и измеряемых перемещений с использованием концептуально новой вычислительной техники – нейропроцессора NM6406 на базе инструментального модуля MC 51.03 и микрокомпьютера MB 77.07, разрабатываемых НТЦ “Модуль”.
Библиографический список
- Vladimir Ruchkin, Vitaliy Romanchuk, Roman Sulitsa. Clustering, Restorability and Designing Of Embedded Computer System Based On Neuroprocessors // Proceedings of the 2nd Mediterranean Conference on Embedded Computing (MECO). - Budva, Montenegro, 2013. - С.58-62.
- Галушкин А.И. Нейрокомпьютеры. Кн.3. М: ИПРЖР, 2000. 528 с.
- НТЦ «Модуль»: сайт НТЦ «Модуль», 2011: URL: http:// www.module.ru.
- Романчук В.А., Ручкин В.Н. Алгоритмы анализа вычислительных структур на базе нейропроцессоров // Вестник РГРТУ. – Рязань : РГРТУ, 2012. – №2. – Вып.40. – С.60–66.
- Романчук В.А., Ручкин В.Н. Оценка результатов моделирования вычислительных систем на базе нейропроцессоров // Известия тульского государственного университета. Технические науки. - Тула : Издательство ТулГУ, 2013. - Вып.9. - Ч.2. - С.194-203.
- Романчук В.А., Ручкин В.Н., Фулин В.А. Разработка модели сложной нейропроцессорной системы // Цифровая обработка сигналов. – Рязань : Информационные технологии, 2012. – №4. – С.70–74.
- Ручкин В.Н., Романчук В.А., Фулин В.А. Когнитология и искусственный интеллект. – Рязань : Узорочье, 2012. – 260 с.
- Романчук В.А., Лукашенко В.В. Разработка математической модели реструктуризуемого под классы задач, виртуализируемого кластера GRID-системы на базе нейропроцессоров // Вестник РГУ имени С.А.Есенина. - Рязань : РГУ имени С.А.Есенина, 2014. - №1(42). - C. 177- 182.
- Романчук В.А., Ручкин В.Н. Разработка программного комплекса для моделирования и анализа нейропроцессорных систем обработки изображений // Цифровая обработка сигналов. – Рязань : Информационные технологии, 2010. – №1. – С.53–58.
- Романчук В.А. Моделирование нейропроцессорных систем // Отраслевые аспекты технических наук : научно-практический журнал. - Москва : ИНГН, 2013. - №10(34). - С.19-24.
Все статьи автора «Романчук Виталий Александрович»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.