МОДЕЛИ ТРАНСПОРТНОГО ИНФРАСТРУКТУРНОГО КОМПЛЕКСА
1Северный (Арктический) Федеральный Университет им. М.В.Ломоносова, студент, Институт Математики, информационных и космических технологий
2Северный (Арктический) Федеральный Университет им. М.В.Ломоносова, кандидат технических наук, доцент кафедры Прикладной математики и высокопроизводительных вычислений Института математики, информационных и космических технологий
Аннотация
В данной статье рассматриваются основные существующие виды моделей транспортного потока, изучаются идеи и методы в области математического моделирования транспортных потоков.
Ключевые слова: имитационные модели, оптимизационное моделирование, прогнозное моделирование, транспортный поток
MODELS OF THE TRANSPORT INFRASTRUCTURE COMPLEX
1Northern (Arctic) Federal University named after M.V. Lomonosov, student, Institute of Mathematics, information and space technologies
2Northern (Arctic) Federal University named after M.V. Lomonosov, candidate of technical Sciences, associate Professor At Kladno mathematics and highly productive on calculations of the Institute of Math, information and space technologies
Abstract
This article examines the main types of models of traffic flow, explores ideas and methods in the field of mathematical modeling of traffic flows.
Рубрика: 05.00.00 ТЕХНИЧЕСКИЕ НАУКИ
Библиографическая ссылка на статью:
Урыков В.А., Зеленина Л.И. Модели транспортного инфраструктурного комплекса // Современные научные исследования и инновации. 2014. № 12. Ч. 1 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2014/12/41692 (дата обращения: 30.07.2026).
Транспортный инфраструктурный комплекс является одним из наиболее значимых составных частей общего устройства экономической жизни городов и регионов. Транспортные сети многих населенных пунктов перегружены, поэтому особое значение приобретает их оптимальное планирование и оптимизация системы управления транспортным потоком. На помощь этому процессу приходит математическое моделирование транспортных сетей. Спектр применяемых при этом математических моделей и методов велик. Исходя из категории задач, на решение которых может быть направлено моделирование, выделяют следующие классы:
- Оптимизационные модели
- Имитационные модели
- Прогнозные модели
Если транспортная система населенного пункта хорошо изучена, т.е. известны ее размещение и основные характеристики, то для определения транспортных потоков можно использовать прогнозные модели, позволяющие рассчитать интенсивность потока, объемы перевозок в сети общественного транспорта по различным направлениям движения и т.д. Кроме того, данный класс моделей позволяет выполнить прогноз последствий изменений, происходящих в транспортной сети.
Дополнением к прогнозным моделям можно отнести имитационные модели, которые по своим результатам являются более детальными. При этом результат прогнозных моделей (усредненные значения потоков и их распределение) могут выступать входной информацией для имитационных моделей, описывающих более подробно не только процесс движения, но и развитие самого процесса во времени. К имитационным моделям можно отнести модели динамики транспортного потока. [1] Динамические модели более детально описывают движение транспортного потока: динамику скорости движения, задержки на перекрестках и другие характеристики движения. Поэтому для их реализации требуются достаточно мощные вычислительные средства.
Динамические модели включают в себя гидродинамические модели (описывают движение автомобилей в усредненных терминах), кинетические модели (описывают транспортный поток плотностью распределения его элементов в пространстве координат и скоростей единиц потока), микроскопические имитационные модели (описывают движение каждой единицы потока), модели типа клеточных автоматов (используется упрощенное дискретное во времени и пространстве описание движения элементов потока). [1, 25]. Остановимся на некоторых из них более подробно.
Гидродинамические модели: [2]
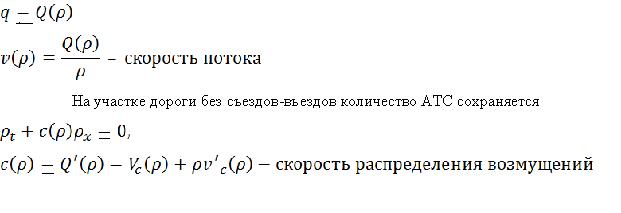
Транспортный поток при этом исследуется как поток одномерной сжимаемой жидкости, при этом учитывается, что поток сохраняется и существует взаимооднозначная зависимость между скоростью и плотностью потока. Кроме того допускается, что средняя скорость потока в каждый момент времени должна соответствовать равновесному значению при данной плотности автомобилей.
- Модели Гриншилдса и Гринберга
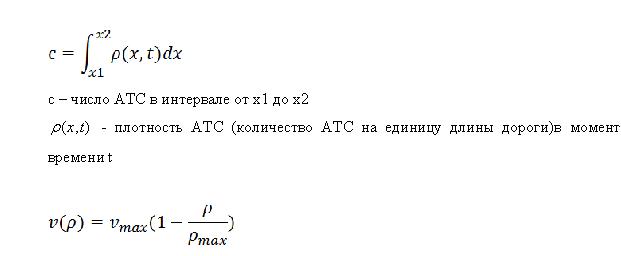
- Модель Гринберга:

- Модель Лайтхила-Уизема.
Предполагается:
- Транспортный поток непрерывен,
 – число автомобилей, занимающих единицу длины дороги.
– число автомобилей, занимающих единицу длины дороги. - Величина потока q(x,t) равная числу автомобилей, пересекающих черту х за единицу времени и определяется локальной плотностью .
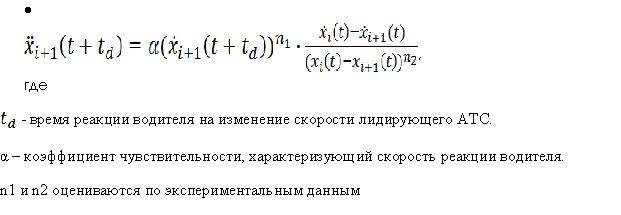
Микроскопические модели [2]
- Модель следования за лидером (дифференциально-разностное уравнение):
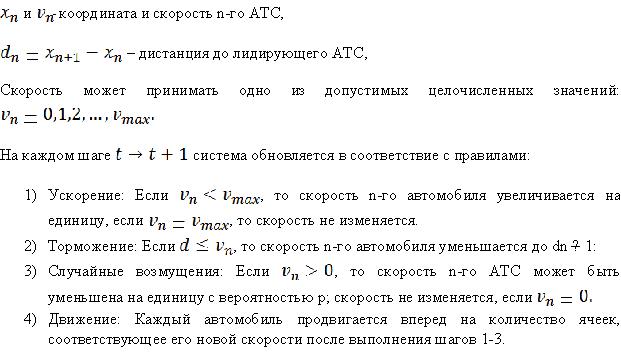
Клеточные автоматы [2]
- Модель Нагеля-Шрекенберга:
Для оптимизации маршрутов транспортных перевозок, определения оптимальной структуры транспортной сети могут быть использованы оптимизационные модели.[3]
Библиографический список
- Швецов В.И. Математическое моделирование транспортных потоков. Автоматика и телемеханика. 2003, № 11. с.3-46
- Семенов В.В. Математическое моделирование динамики транспортных потоков мегаполиса. - Изд-во: Институт прикладной математики им. М.В. Келдыша, 2004.
- Морозов И.И. и др. Численное исследование транспортных потоков на основе гидродинамических моделей // Компьютерные исследования и моделирование 2011 Т.3№ 4 с.389-412
- Лившиц В.Н. Автоматизация планирования и управления транспортными системами. М.: Транспорт, 1987.
- Введение в математическое моделирование транспортных потоков: Учебное пособие / А.В.Гасников и др. – М.:МЦНМО, 2012. – 376с.
Все статьи автора «Зеленина Лариса Ивановна»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.