ГЕОМЕТРИЧЕСКИЙ СИНТЕЗ МЕХАНИЗМА ПОВОРОТА СТРЕЛЫ МАНИПУЛЯТОРА
1ФГБОУ ВПО Волгоградский государственный аграрный университет, заведующий кафедрой «Механика»
2ФГБОУ ВПО Волгоградский государственный аграрный университет, доцент кафедры «Механика»
Аннотация
В статье приведен расчет геометрических параметров механизма поворота стрелы манипулятора с тандемным включением исполнительных гидроцилиндров на конкретном примере. Предложенная схема механизма поворота стрелы позволяет существенно расширить рабочую зону обслуживания манипулятора.
Ключевые слова: Манипулятор, особые положения, Синтез механизма поворота
GEOMETRIC SYNTHESIS MECHANISM PIVOTING RANGE OF OF THE MANIPULATOR
1Volgograd State Agricultural University, PhD, Head of the Department "Mechanics"
2Volgograd State Agricultural University, Ph.D., assistant professor of "Mechanics"
Abstract
The paper presents the calculation of the geometric parameters of the mechanism pivoting range of of the manipulator with tandem inclusion actuators cylinders on a concrete example. The proposed scheme pivoting range of mechanism can significantly extend the working area of the manipulator service.
Рубрика: 05.00.00 ТЕХНИЧЕСКИЕ НАУКИ
Библиографическая ссылка на статью:
Несмиянов И.А., Карева Н.В. Геометрический синтез механизма поворота стрелы манипулятора // Современные научные исследования и инновации. 2014. № 12. Ч. 1 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2014/12/39830 (дата обращения: 30.07.2026).
Зона обслуживания погрузочного манипулятора является одной из важнейших характеристик погрузочного средства, чем больше площадь сечения зоны обслуживания в базовых плоскостях, тем меньше требуется глобальных перемещений манипулятора с грузом. Увеличение геометрической площади сечения зоны обслуживания погрузочного манипулятора возможно за счёт изменения длин исполнительных звеньев манипулятора, что в свою очередь ведёт к увеличению значений углов давления и усилий в исполнительных гидроцилиндрах, приводящих к повышенным энергозатратам на перемещение груза. Для расширения зоны обслуживания манипуляторов с поворотной стрелой можно использовать механизм поворота с тандемным (последовательным) включением исполнительных гидроцилиндров [1].
Угол поворота колонны зависит как от линейных размеров рычагов, так и от параметров исполнительных гидроцилиндров.
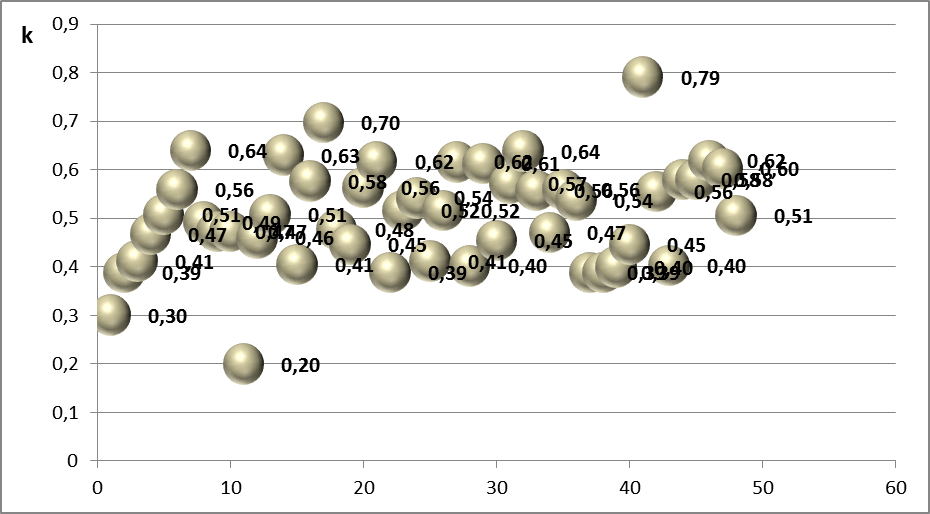 Рисунок 1. Пузырьковая диаграмма распределения коэффициента удлинения цилиндров от количества анализируемых изделий.
Рисунок 1. Пузырьковая диаграмма распределения коэффициента удлинения цилиндров от количества анализируемых изделий.
Проанализировав номенклатуру гидроцилиндров, применяемых в сельскохозяйственном машиностроении, выявлено следующее: коэффициент удлинения (отношение хода штока к межосевому расстоянию) k=S/L колеблется от 0,2 до 0,8, причём наиболее часто используемые цилиндры имеют k=0,4…0,6 (рис.1 и 2).
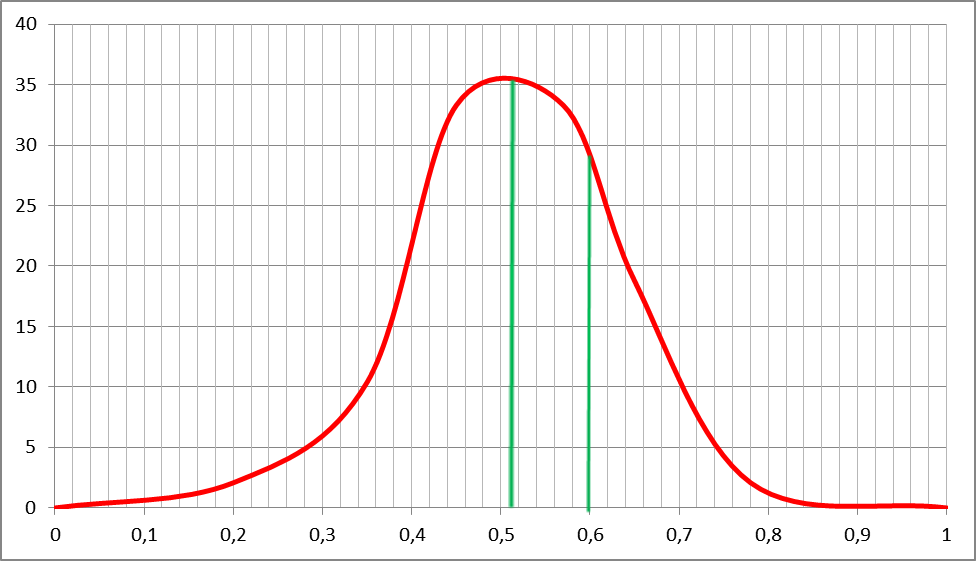 Рисунок 2. Распределения гидроцилиндров по коэффициенту удлинения.
Рисунок 2. Распределения гидроцилиндров по коэффициенту удлинения.
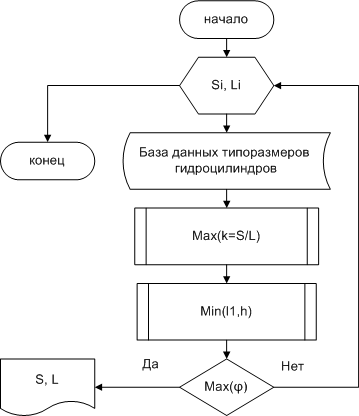 Рисунок 3. Блок-схема программы подбора рациональных параметров гидроцилиндров механизма поворота.
Рисунок 3. Блок-схема программы подбора рациональных параметров гидроцилиндров механизма поворота.
Подбор наиболее рациональных параметров гидроцилиндра поворота колонны проводился на ЭВМ, блок-схема алгоритма выбора гидроцилиндра из базы данных типоразмеров приведена на рис. 3.
В качестве конкретного примера с учётом минимизации размеров механизма поворота выбираем гидроцилиндры с межосевым расстоянием менее 600 мм, например гидроцилиндр ЦГ-50.30х320.22 с межосевым расстояниеь L – 522 мм и ходом штока S, – 320 мм. Тогда коэффициент удлинения гидроцилиндра k=0,613, Lmin=522 мм, Lmax= 842 мм.
Оптимальные геометрические параметры (h, l1, φmin, φmax) будем определять из уравнений проекции векторного контура с учётом углов давления [υ]≤600 [2].
Составим уравнение векторного контура для одного гидроцилиндра (для второго контура задача будет решаться аналогично):
![]() (1)
(1)
Согласно рис. 4 уравнения проекций векторного контура
![]() , (2)
, (2)
![]() (3)
(3)
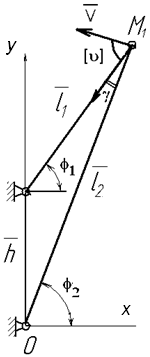 Рисунок 4 –К определению уравнения векторного контура.
Рисунок 4 –К определению уравнения векторного контура.
Разделив выражение (3) на (2), получим
 . (4)
. (4)
Зададимся предельным углом давления [u], который в рычажных механизмах не должен превышать 60°. Найдя его взаимосвязь с j1 (рис. 4), окончательно получим
 . (5)
. (5)
Из выражения (5) определим j1min и j1max. Зная пределы изменения угла j1, найдём множество координат точки М, получив угол поворота колонны со стрелой при заданном предельном угле давления в шарнирах [u].
Рассмотрим частный случай положения механизма поворота, когда угол φ1=0. В этом случае будем считать, что l2=L+S/2, тогда по теореме синусов при β=π/2-φ2 (рис.5)
 (6)
(6)
 Рисунок 5 – К определению зависимостей h и l1 от углов поворота звеньев.
Рисунок 5 – К определению зависимостей h и l1 от углов поворота звеньев.
Из выражения (6) при Sin(π/2)=1 и L+S/2=686 мм следует
 (7).
(7).
Тогда при φ1=0 h=682·Sin(φ2) и l1=682·Cos(φ2), где 300< φ2<600, так как γ= φ2=π/2-[υ].
На рис. 6 представлен график изменения h и l1 от φ2, на основании которого принимаем значения h и l1, удовлетворяющие допускаемым углам давления. Перед тем как принять по графику (рис.6) значения h и l1, определим, занимает ли механизм поворота особые положения, геометрически вырождающие механизм.
Неассуровая структурная группа –кинематическая цепь с ненулевым числом независимых входов, равных числу степеней подвижности. Такие группы используют в исполнительных механизмах подъемно-транспортных и строительно-дорожных машинах, роботах и манипуляторах. Для нахождения особых положения необходимо ввести дополнительные обобщенные координаты и составить функцию положения механизма, а затем найти якобиан для данного механизма. Признак особых положений – это равенство якобиана нулю. Из этого условия и находятся значения дополнительных обобщенных координат, соответствующих особым положениям.
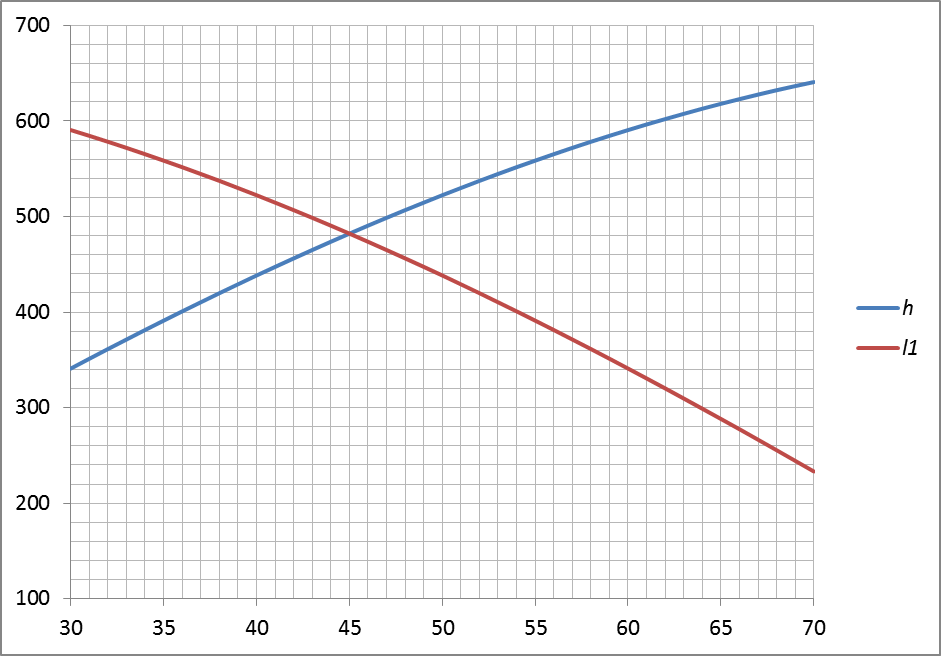 Рисунок 6 – График изменения h и l1 от φ2
Рисунок 6 – График изменения h и l1 от φ2
Для механизма, представленного на рис.4 функциями положения будут выражения (2) и (3), тогда якобиан примет вид:
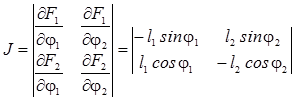 (8)
(8)
Вырождение для особого положения:
![]() (9)
(9)
Из выражения (9) видно, что особые положения наблюдаются при φ1=0 и φ2=0, или при φ1=π/2 и φ2= π/2. Для рассматриваемого механизма эти значения углы поворота звеньев не принимают.
Геометрический признак особых положений, это расположение шарнира М на оси шарниров ОО1.
Принимаем h=602 мм, l1=300 мм (немного уменьшенное значение). Для принятых значений используя выражения (2) и (3) определим зависимости изменений угла поворота рычага l1 при изменении длины гидроцилиндра от l2min=522 мм до l2max=842 мм (рис.7).
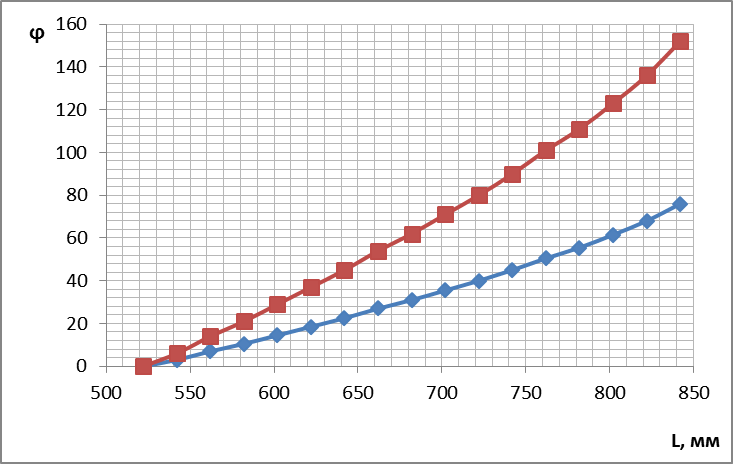 Рисунок 7 – Зависимость угла поворота рычага поворотной колонны от одновременного удлинения цилиндров.
Рисунок 7 – Зависимость угла поворота рычага поворотной колонны от одновременного удлинения цилиндров.
Полученные зависимости изменения угла φ1 нелинейны, в итоге получим нелинейные законы изменения скоростей и ускорений.
Основные преимущества предлагаемой схемы привода поворотной стрелы погрузчика:
- При зоне действия рабочего органа в горизонтальной плоскости 75о, поворот стрелы дополнительным цилиндром расширяет зону до 150о. Угол поворота стрелы естественно зависит от хода поршня цилиндра.
- Поворот стрелы может происходить при угловой скорости, почти в два раза превышающую скорость одной из составных частей колонны, т.к. угловые скорости складываются. Асинхронной работой обоих цилиндров можно добиться более медленного поворота, а в нужный момент времени плавно останавливать стрелу.
Библиографический список
- Патент РФ №2455222. Гидропривод погрузчика с поворотной колонной. Несмиянов И.А., Герасун В.М., Воробьева Н.С., Токарев В.И., Турыгин П.В. Опубл. 10.07.2012. Бюл.№19.
- В М. Герасун, В.И.Пындак, И.А.Несмиянов, В.В.Дяшкин-Титов, В.Е.Павловский. Манипуляторы для мобильных роботов. Концепции и принципы проектирования // Препринт ИПМ им. М.В.Келдыша. 2012. №44. 24 с. URL://library.keldysh.ru/preprint.asp?id=2012-44.
Все статьи автора «Несмиянов Иван Алексеевич»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.