НЕЙРОСЕТЕВАЯ ИДЕНТИФИКАЦИЯ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА
1Череповецкий государственный университет, магистрант кафедры электротехники и электроэнергетики
2Череповецкий государственный университет, кандидат технических наук, доцент кафедры электротехники и электроэнергетики
Аннотация
В статье рассматривается возможность применения методов искусственного интеллекта для решения задач, ранее решаемых методами классической теории автоматического управления. Приведены результаты эксперимента, подтверждающие эффективность применения многослойной рекуррентной нейронной сети для идентификации электропривода постоянного тока. Рассмотрен вопрос применения подобного метода в составе управляющих алгоритмов систем управления электроприводами.
Ключевые слова: нейронная сеть, Электропривод постоянного тока
NEURONETWORK IDENTIFICATION OF THE ELECTRIC DRIVE OF A DIRECT CURRENT
1Cherepovets state university, Graduate student student of chair of electrical equipment and power industry
2Cherepovets state university, PhD in Technical Sciences, Associate professor of electrical equipment and power industry
Abstract
Article describes methods of artificial intelligence for the solution of the tasks which are earlier solved by methods of the classical theory of automatic control. The results of experiment confirming efficiency of application of a multilayered recurrent neural network for identification of the DC drive are given. The question of application of a similar method as a part of operating algorithms of control systems is considered by electric drives.
Рубрика: 05.00.00 ТЕХНИЧЕСКИЕ НАУКИ
Библиографическая ссылка на статью:
Волков В.Н., Кожевников А.В. Нейросетевая идентификация электропривода постоянного тока // Современные научные исследования и инновации. 2013. № 4 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2013/04/23648 (дата обращения: 30.07.2026).
Преобладание микропроцессорных систем управления в современных и перспективных электроприводах позволило увеличить алгоритмические возможности управления благодаря гибкости программного обеспечения. Появилась возможность построения систем электроприводов с широкими возможностями регулирования параметров, диагностики состояния, самонастройки и адаптации. Одной из ключевых задач для построения подобных систем является идентификация электропривода. Идентификация позволяет получить модель электропривода с допустимой для практического применения погрешностью динамики.
Когда известна общая математическая модель объекта, то расчет и построение уточненной модели возможны методами классической теории автоматического управления. На практике современные электропривода часто представляют собой многомассовые системы и имеют существенные нелинейности. Линеаризованные модели, построенные на передаточных функциях, не всегда могут адекватно отобразить электропривод во всех его режимах работы. Но даже при наличии такой модели, в реальных системах применяются более простые программные методы, позволяющие получить грубую идентификацию объекта для автонастройки регулятора и диагностики системы. Это связано с ограниченными ресурсами систем управления по памяти и мощности процессоров.
Искусственные нейронные сети являются альтернативным инструментом идентификации динамических объектов. Существует теорема об универсальной аппроксимации многослойной нейронной сети, утверждающая, что многослойной сети с одним скрытым слоем достаточно для получения равномерной аппроксимации с точностью для любого обучающего множества, представленного входами и желаемых откликов
[1],[3],[4]. В рамках данной статьи рассмотрено применение нейронной сети для частного случая идентификации электропривода постоянного тока. Возможность такого подхода к идентификации ограничивается лишь достаточным количеством обучающих примеров типа «вход-выход» применительно к параметрам конкретного электропривода. Для эксперимента выбрана сеть, известная как модель нелинейной регрессии с внешними входами NARX [2],[4]. Обобщенная модель имеет форму:
где – выходной вектор,
– входной вектор,
– дискретный момент времени,
-порядок системы. Такая сеть, имея обратные связи с единичной задержкой, позволяет построить на ее основе модель динамического объекта любой сложности. Ниже приведена структурная схема сети NARX (Рис.1).
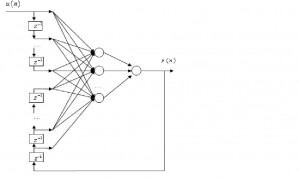
Рисунок 1. Рекуррентная многослойная нейронная сеть NARX.
В приложении Simulink среды разработки Matlab было произведено обучение нейронной сети. Обучающее множество снято с модели электропривода постоянного тока при подаче на вход случайного сигнала. Для обучения использовался алгоритм Левенберга-Марквардта. Обучение производилось в течении 300 итераций и ошибка обучения . На 10 секунде подавался момент сопротивления. Результаты моделирования для трех величин
напряжения задания представлены на графике (Рис. 2).
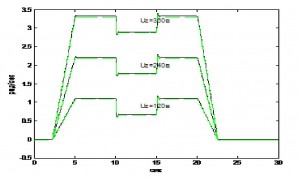
Рисунок 2. График сравнения скоростей модели электропривода и нейросетевой модели.
Из графика видно, что нейронная сеть с достаточной точностью повторяет динамику модели электропривода во всем диапазоне его работы.
Данный метод построения модели не требователен к ресурсам микропроцессорной системы управления, так как не требует решения сложных дифференциальных уравнений. Кроме того, метод может быть применен к электроприводам любой сложности. Недостатком метода является необходимость после обучения модели проверки ее на адекватность новыми данными, не участвовавшими в обучении. Это связано с опасностью переобучения сети [4]. Эта проблема может быть решена программным контролем результата обучения перед применением.
Таким образом, сеть типа NARX можно использовать в составе управляющих алгоритмов в системах управления для идентификации электроприводов, когда имеется возможность получить множество обучающих примеров в рабочем диапазоне. Возможно использование сети NARX при построении полностью нейросетевых систем управления [5] применительно к электроприводам.
Библиографический список
- Горбань А.Н. Обобщенная аппроксимационная теорема и вычислительные возможности нейронных сетей // Сибирский журнал вычислительной математики/РАН. Сибирское отделение. – Новосибирск,1998. –Т.1,№1.-с.11-24
- Макаров И.М., Лохин В.М. Интеллектуальные системы автоматического управления –М. ФИЗМАЛИТ, 2001-576с.
- Терехов В.А. Нейросетевые системы управления / В.А. Терехов, Д.В. Ефимов, И.Ю Тюкин –М.: ИПРЖР,2002. – 480с.
- Хайкин С. Нейронные сети: полный курс, 2-е издание: Пер. с англ. – М.: Издательский дом «Вильямс». 2006. – 1104с.
- Чернодуб А.Н., Дзюба Д.А. Обзор методов нейроуправления – Киев. Институт проблем математических машин и систем НАН Украины.
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.