СОРОКИН С.А. ГРАФОАНАЛИТИЧЕСКИЕ МЕТОДЫ ИССЛЕДОВАНИЯ МЕХАНИЗМОВ МАШИН
Рубрика: 05.00.00 ТЕХНИЧЕСКИЕ НАУКИ
Библиографическая ссылка на статью:
// Современные научные исследования и инновации. 2012. № 5 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2012/05/12311 (дата обращения: 30.07.2026).
В инженерной практике решение задач осуществляется двумя методами аналитическим и графическим.
Графоаналитические методы отличаются наглядностью, удобством контроля и быстротой решения ряда практических задач. Основными недостатками графоаналитических методов считаются: меньшая точность, чем у аналитических методов и нередко большая громоздкость построений, особенно при стремлении повысить точность расчетов.
Вследствие этого аналитические методы с началом развития вычислительной техники вышли на первый план как более точные, а эффективность проверенных временем геометрических теорий оказалась в зависимости от несовершенства графических инструментов, погрешностей и значительных временных затрат на проведение расчетов [1].
Однако не следует пренебрегать графоаналитическими методами, которые с появлением новых компьютерных графических программ, сохранив свои достоинства, полностью лишились своих недостатков. Точность графических построений стала сравнима с аналитической (до десяти знаков после запятой), а необходимость в громоздких однотипных построениях отпала с использованием параметрических моделей.
Идея параметризации уже прочно завоевала свое место в компьютерном проектировании. Под параметризацией подразумевается, прежде всего, многократное использование чертежа с возможностью изменения его параметров [2]. Продемонстрируем возможности графоаналитического метода с элементами параметризации в чертежно-графическим редактором «Компас-График», разработанный компанией «Аскон». На первом этапе решения задачи по модели заданного механизма формируем кинематическую схему (рис. 1).
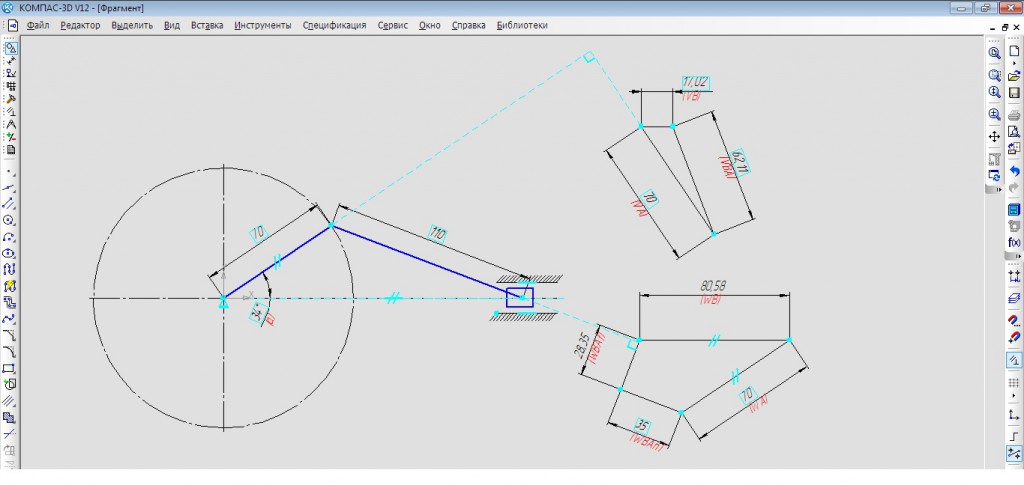
Рис. 1. Параметрическая модель кривошипно-ползунного механизма
Пользуясь графическим способом, строим план скоростей и ускорений для заданного положения механизма. Теперь делаем модель параметрической: задаем звеньям механизма нужные степени свободы, фиксируем их размеры и устанавливаем геометрические связи между положением звеньев и соответствующими векторами скоростей и ускорений. Полученная модель может управляться любым параметром, чаще, в качестве обобщенной координаты используют угол наклона кривошипа. Изменяя его значение механизм автоматически перестраивается вместе с планами скоростей и ускорений, значение которых легко и с высокой точностью снимаются с модели.
Подобный подход пригоден для механизмов различной структуры, дает возможность оценить, пересчитать кинематические, динамические характеристики механизма в любом положении, с заданным шагом, увидеть изменение этих параметров в динамике. Параметризация в системах САПР предполагает и нелинейные зависимости, что дает возможность получать модели с широким спектром выходных данных.
Такой подход к анализу механизмов машин полезно использовать в учебном процессе студентов инженерных специальностей. Он дает навык работы с системами САПР, и демонстрируем возможности комбинирования различных способов решения задач.
1. Ф.Е. Ляшко Графоаналитический метод синтеза рычажных механизмов и расчеты на прочность / Ф.Е. Ляшко, Д.Г. Вольсков //Известия Самарского научного центра Российской академии наук, т11, №3(2),2009. С.430-436.
2. Шалумов А.С., Багаев Д.В. Осипов А.С. Система автоматизированного проектирования КОМПАС-ГРАФИК: Часть 2, Учебное пособие. – Ковров: КГТА, 2005. – 42 с.
Все статьи автора «Сорокин С.А.»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте.