

В данном исследование представлен вариант распознавания предупреждающих дорожных знаков с помощью использования нейронных сетей.
Достижение этой цели подразумевает решение следующих задач:
- Преобразование цветового пространства.
- Удаление шумов.
- Верификация объектов интерфейса.
- Идентификация дорожного знака
Первым этапом реализации проекта являлось определение контуров предупреждающего дорожного знака (Рис. 1).

Рисунок. 1. Контуры предупреждающего дорожного знака
Все предупреждающие дорожные знаки имеют хатактерный отличительный признак, а именно контур ярко-красного цвета. Входной сигнал представлял собой последовательность изображений, которые были представлены в цветовой гамме RGB виде матрицы в три слоя MxNx3, состоящей из цветных пикселей. После чего было выполнено преобразование в черно-белый вариант, где красный и наиболее близкие оттенки обозначались белым, а все остальное черным.
Следующим шагом в реализации проекта являлся процесс устранения шумов. Шумы устранялись с помощью медианного фильтра (Рис. 2), который в реализации проще чем Гауссов, однако для данной задачи качество усреднения не важно поэтому использовался именно этот фильтр.
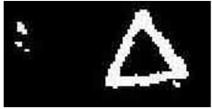
Рисунок. 2. Бинаризованное изображение и формула медианнго фильтра.
Последовательно используя алгоритмы медианного фильтра и бинаризации изображения, подавлялись практически все шумы (Рис. 3).
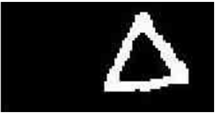
Рисунок. 3. Результат работы медианного фильтра.
Дальнейшим действие нашего проекта являлась верификация найденного объекта. Поскольку в нашем случае просто знание того что фон красный недостаточно было введено дополнительное свойство. У знака это правильный треугольник. Для этого мы должны были проверить границы объекта. Для достижения этой цели применялся оператор Собеля, который выделял границы изображения. А поскольку мы применяем его к бинарному изображению, он был реализован в примитивной форме просмотра градиента в узкой области. После чего по формулам векторной алгебры было проверено, насколько правильный данный треугольник. Для этого бралось усредненное значение прямых для различных точек из границы (рис 5).
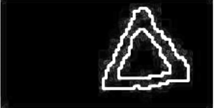
Рисунок. 4. Результат выполнения оператора Собеля.
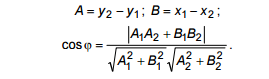
Объект считается верифицированным, если

Рисунок. 5. Нахождение углов треугольника и проверка его на правильность.
Последним шагом являлось определение дорожного знака в определенном нами контуре. Для классификации дорожного знака была использована глубокую сеть, в которой вначале были заданы большие веса, которые потихоньку уменьшались, пока не достигли состояния равновесия, которое и было использовано. Полученная таким образом нейронная сеть была использована как начальное приближение при обучении методом обратного распространения ошибки. Наконец используя настроенную сеть можно было получать информацию о том, какой дорожный знак располагался на фотографии или картинке.
Результаты исследований
Для тестирования было использовано два набора знаков, каждый из которых состоял из 150 элементов, на 130 из них были знаки. Результаты тестирования представлены в таблице 1.
Таблица. 1. Результаты работы программы на тестовых наборах данных
| Параметры | Результаты | |
| Тест 1 | Тест 2 | |
| Общее кол-во знаков | 130 | 130 |
| Кол-во правильных распознаний | 118 | 116 |
| Кол-во ошибок | 8 | 8 |
| Кол-во пропущенных (не замеченных) знаков | 7 | 10 |
| Среднее время обработки фото. | 0.4 | 0.1 |
На основании полученных результатов можно сделать вывод, что сверточная нейронная сеть хорошо подходит для задач связанных с распознаванием изображений и имеет среднюю точность 90,7%.
Библиографический список
- Сверточная нейросеть, взгляд изнутри [Электронный ресурс]. – Режим доступа: http://ru.datasides.com/code/cnn-convolutional-neural-networks/ (Дата обращения: 22.04.2017 г.).
- OpenCV 2 Computer Vision Application Programming Cookbook [Электронный ресурс]. – Режим доступа: http://www.laganiere.name/opencvCookbook/ (Дата обращения: 23.04.2017 г.).
- OpenCV шаг за шагом [Электронный ресурс]. – Режим доступа: http://robocraft.ru/blog/computervision/427.html (Дата обращения: 24.04.2017 г.).
- Наборы изображений с дорожными знаками [Электронный ресурс]. – Режим доступа: http://www.cvl.isy.liu.se/research/datasets/traffic-signs-dataset/download/ (Дата обращения: 28.04.2017 г.).
Количество просмотров публикации: Please wait