

Важным параметром эксплуатации подшипника скольжения является траектория движения вала внутри подшипника, называемая орбитой. Под орбитой вала понимается траектория перемещения точки, находящейся на центральной оси вала, за один его полный оборот.
На сегодняшний день существует множество систем для анализа вибрации механических узлов оборудования [1-6].
В данной работе предлагается использовать для построения орбиты вала сигналы с двух датчиков вибрации, установленных на подшипнике скольжения под углом 90о друг относительно друга (рисунок 1). Один датчик установлен горизонтально, второй – вертикально.
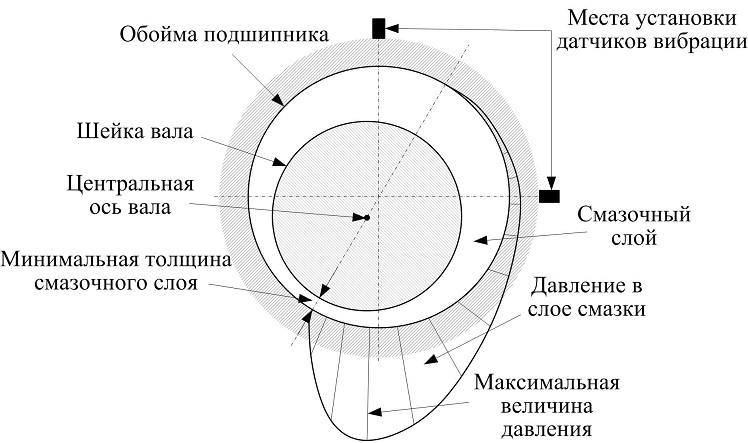
Рисунок 1. Подшипник скольжения
Возможность использования датчиков вибрации для построения орбиты вала основана на том факте, что при вращении вал совершает колебания, следовательно, перемещение его центральной оси пропорционально этим колебаниям. Поэтому для построения орбиты вала можно использовать сигналы виброперемещения с двух датчиков, установленных под углом 90о друг к другу в вертикальной плоскости, перпендикулярной центральной оси вала.
Орбита вала в данном случае будет представлять собой круговое движение вектора, как показано на рисунке 2.
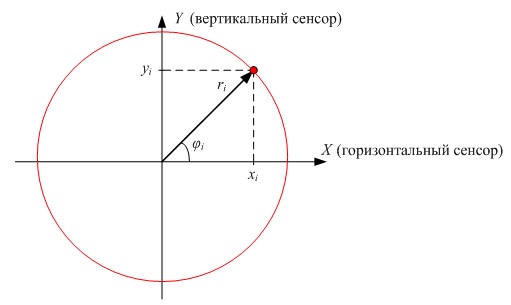
Рисунок 2. Определение траектории вращения вектора, описывающего орбиту вала
Модуль вектора ri рассчитывается по выражению:
![]() ,
,
где xi и yi – значения виброперемещения, полученные с горизонтально и вертикально установленных датчиков, соответственно.
Текущее значение угла наклона вектора φi можно найти по выражению:
![]() .
.
В случае использования датчиков вибрации на подшипнике скольжения наблюдается некоторое ослабление сигнала, полученного с датчиков, связанное с наличием достаточно толстого смазочного слоя между шейкой вала и чувствительным элементом датчика. Однако такое ослабление не должно существенно повлиять на результаты измерения [6].
Для проверки предлагаемой системы расчета орбиты вала был проведен эксперимент в условия производства листовой стали листопрокатного цеха № 4 (ЛПЦ4) ОАО «ММК».
В качестве датчиков вибрации использовались датчики VSA001 производства компании ifm electronics. Для чтения сигналов с датчиков использовались контроллеры ifm electronics VSE002. Данная система мониторинга и виброконтроля установлена при непосредственном участии авторов на оборудовании чистовой группы клетей прокатного стана горячей прокатки ЛПЦ4 ОАО «ММК». Мнемосхема системы приведена на рисунке 3.
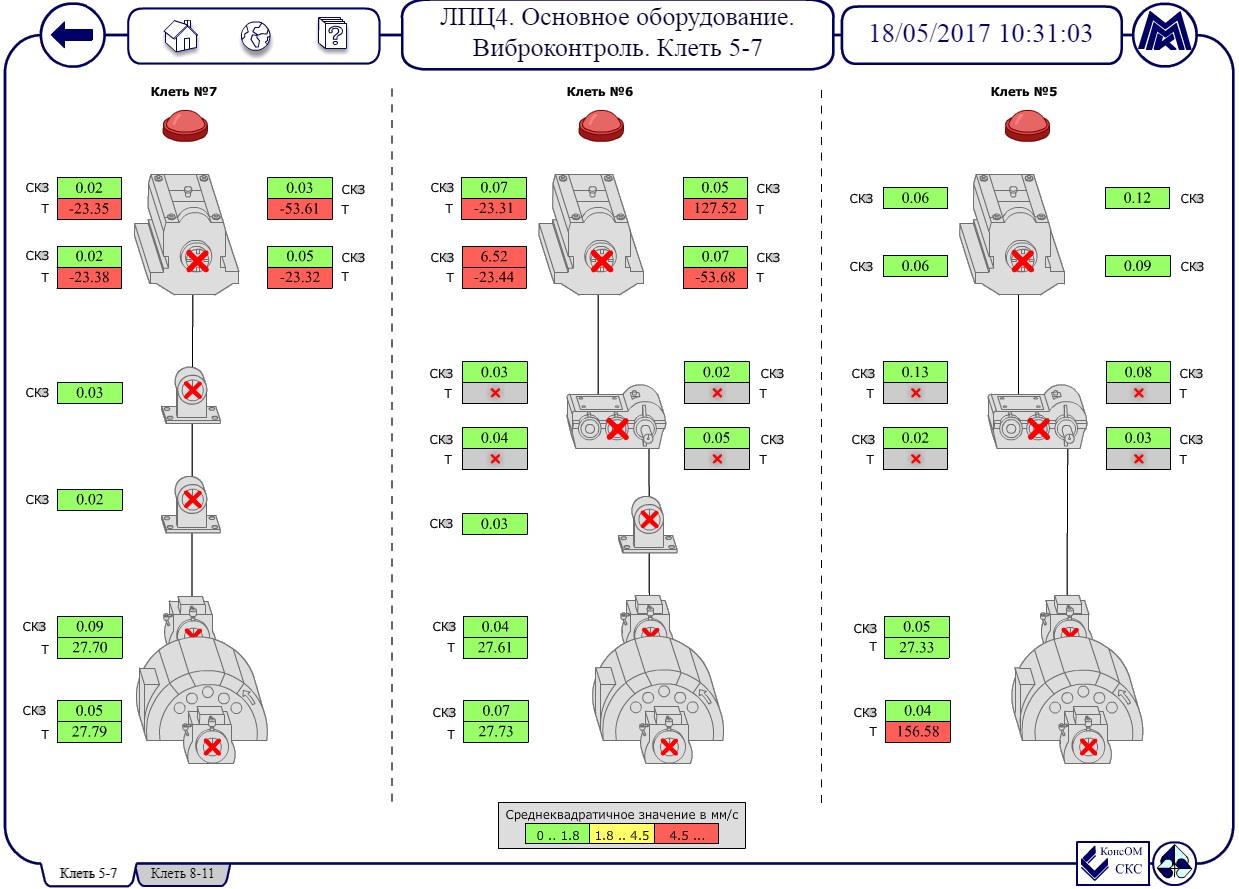
Рисунок 3. Мнемосхема системы виброконтроля основного оборудования ЛПЦ4 ОАО «ММК»
Контроллер VSE002 считывает с датчиков вибрации VSA001 величину виброускорения вала. Полученные значения виброускорений с двух датчиков пересчитываются в величины виброперемещений [1]. После синхронизации во времени результирующих сигналов виброперемещения и их фильтрации вычисляется траектория вращения вектора ri по вышеприведенным выражениям. В результате этого были получены графики орбиты вала, как показано на рисунке 4.
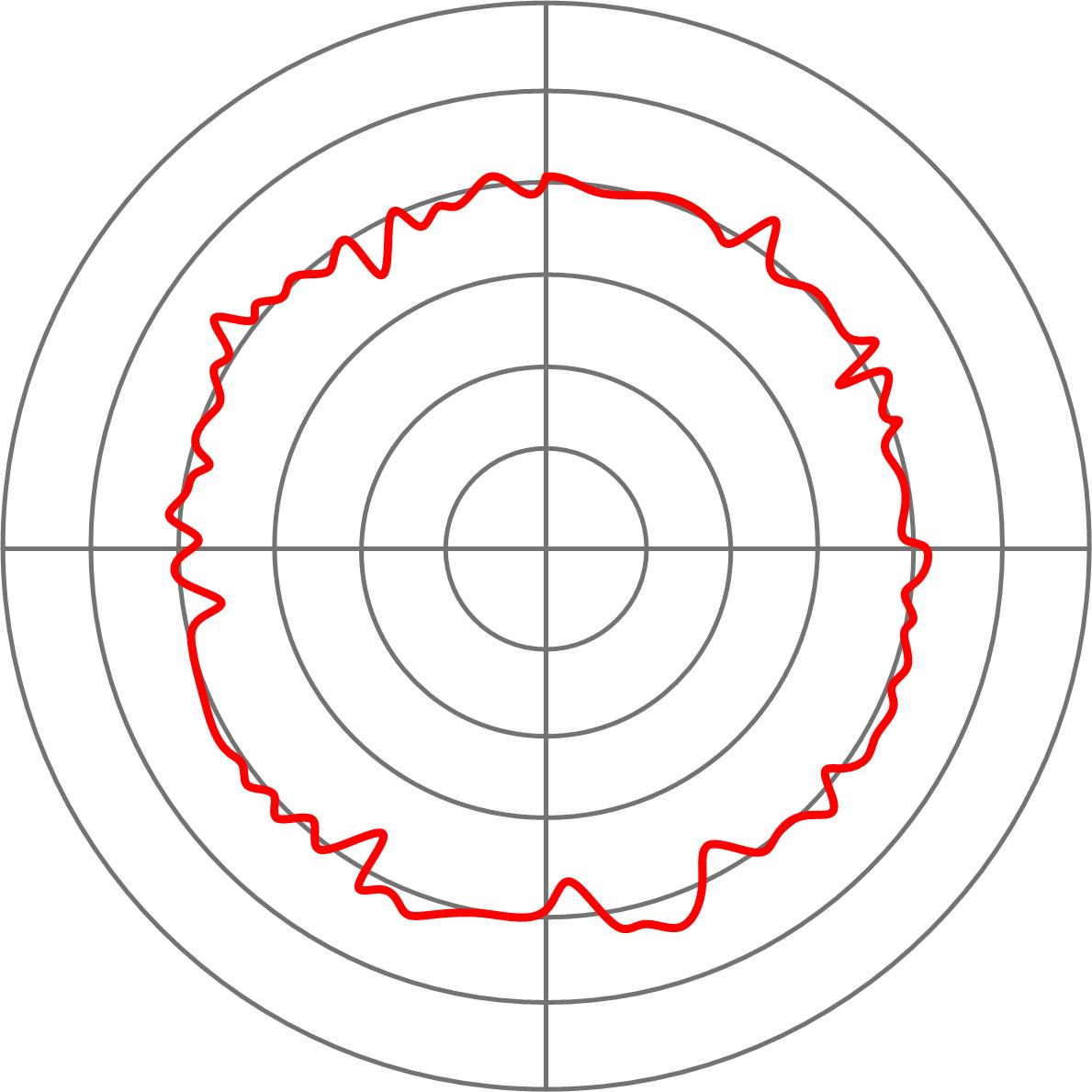
Рисунок 4. Орбита вала
По результатам проделанной работы можно сделать вывод о том, что для построения орбиты вращающегося вала подшипника скольжения возможно использование датчиков вибрации. Датчик вибрации является хорошей альтернативой датчику приближения, обычно применяемого для данной цели. Разработанная система позволяет контролировать орбиту вала с целью диагностики дефектов оборудования.
Библиографический список
- Неразрушающий контроль: справочник в 7-ми томах // Под ред. В.В. Клюева, том 7, книга 2. М.: Машиностроение, 2005. 829 с.
- Adams M.L. Rotating Machinery Vibration: From Analysis to Troubleshooting. 2nd edition. CRC Press, Taylor & Francis Group, 2010. 476 p.
- Ishmetyev E.N., Logunova O.S., Panov A.N., Cistyakov D.V., Bodrov E.E. Stationary automatic vibration control and analysis systems: application experience. Journal of Computational and Engineering Mathematics, 2017, vol.4, no. 1, pp. 3-15.
- R. Mistry, B. Finley, S. Kreitzer, R. Queen. Influencing factors on motor vibration & rotor critical speed in design, test and field applications. Petroleum and Chemical Industry Technical Conference, 2014, DOI: 10.1109/PCICon.2014.6961887.
- Бойназаров Г.Г. Влияние эксплуатационных параметров на долговечность подшипниковых опор буровых станков // Science Time. 2016. № 8 (32). С. 33-38.
- Темис Ю.М., Темис М.Ю., Егоров А.М. Исследование чувствительности колебаний ротора стационарной ГТУ на подшипниках скольжения к измерению основных параметров системы // Известия МГТУ «МАМИ». Т.3. №1(15). 2013. С. 139-147.
Количество просмотров публикации: Please wait