Исследование деятельности оператора, отвечающего за управление сложными технологическими процессами – главная тема научных трудов и дискуссий последних лет. На сегодняшний день, большое количество процессов управления выполняет компьютер, что освобождает людей от проблем, которые не поддаются автоматизации. Но человеческий фактор продолжает играть весомую роль в системах человек-машина. Вследствие этого, адаптация и обучение оператора управлению технических систем не становится проще, а напротив, усложняется, за счет совершенствования человеко-машинного интерфейса [2].
Для снижения аварийности и несчастных случаев на горном производстве необходимо детальное изучение проблем связанных с эффективностью управления горной машины. Данные требования повлекли за собой необходимость использования математических моделей для описания деятельности системы человек-машина.
Описание в виде математических моделей динамики поведения оператора является одной из задач исследования подсистемы «человек-экскаватор».
Опираясь на научные труды [3,4] разработана структурно-функциональная схема модели «человек-машина» (рис.1), описывающая процесс управления карьерным экскаватором. Совместное использование данной схемы и математическими зависимостями, задав определенные параметры, можно определить след показатели: безошибочное выполнение работы оператора [3], экспертную оценку деятельности операторов [1] и т.д.
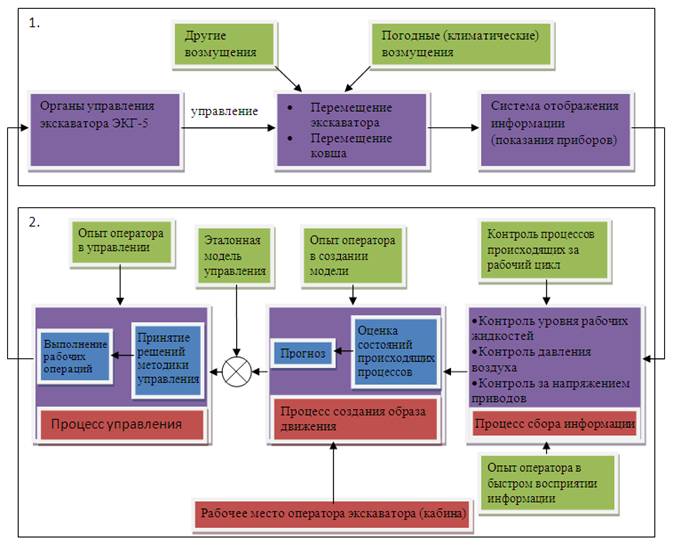
Рис.1. Функциональная схема системы человек – машина
Разработанная модель разделена на два блока. Первый (рис.2) – модель управления экскаватором, который включает в себя: органы управления, перемещение (динамика) ковша и экскаватора в пространстве и показания приборов с внешней обстановкой объекта управления. Оператор, за один цикл работы машины совершает ряд операций, такие как: черпание грунта или горной массы (гм); выведение ковша с грунтом из забоя; перемещение ковша к месту разгрузки; разгрузка ГМ из ковша в отвал или в транспортное средство; перемещение ковша в забой.
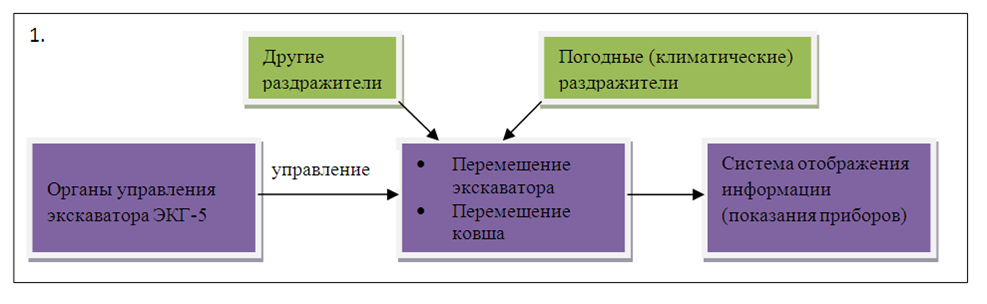 Рис.2. Модель управления ЭКГ-5А
Рис.2. Модель управления ЭКГ-5А
Второй блок (рис.3) – это модель «оператор-экскаватор». За рабочий цикл оператор экскаватора контролирует множество параметров, основными из которых являются: контроль взаимодействия ковша с забоем; контроль над незапланированным обрушением верхней кромки забоя и наличием негабарита; правильность подъезда транспорта и полнота его загрузки; контроль за местоположением транспорта и появлением посторонних объектов; контроль за основной информацией, отображаемой на пульте управления; правильность закрывания и открывания днища ковша;
Рассматриваемый блок построен при упоре на перечисленные параметры. Модель описывает состоит из трех процессов:
- процесса сбора информации, который включает обработку информации и ее восприятие оператором;
- процесса создания образа движения, который в свою очередь включает в себя оценку состояний происходящих процессов, вследствие которого составляется прогноз движения;
- составленный и спрогнозированный образ движения экскаватора сравнивается с эталонным, и на основе этого в последнем процессе – процессе управления вырабатывается и осуществляется управление.
Для выполнения всех перечисленных процессов оператор должен быть обучен, иметь навыки в восприятии информации, в формировании образа движения и управления. И чем выше уровень подготовки оператора, тем эффективней и быстрей он будет выполнять данные действия [5].
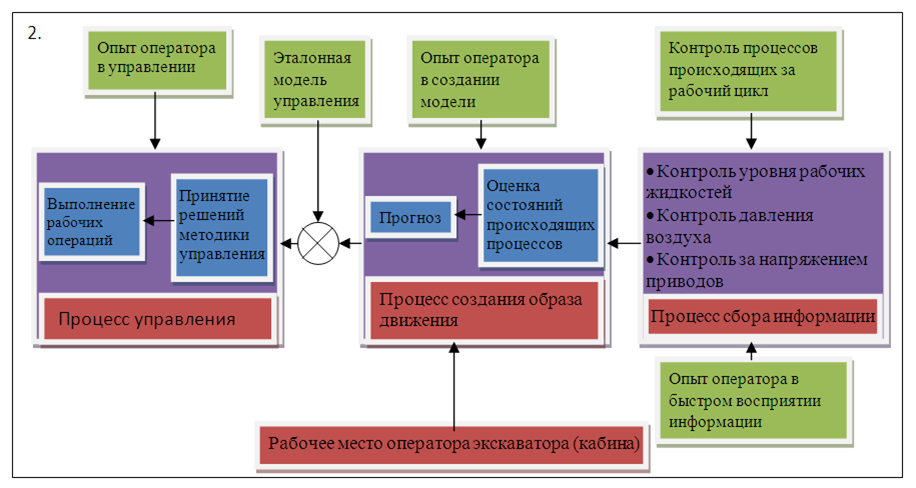
Рис. 3. Модель человека-оператора ЭКГ-5А
Для создания и разработки методик обучения и тренировки операторов, должны быть учтены и исследованы множество параметров, которые влияют на рабочий процесс. Кафедра горных машин и транспортно-технологических комплексов МГТУ им. Носова, ведет научные и практические исследования в этом направлении, и получила положительные результаты (например [6-9]), на основании которых планируется создание новых обучающих комплексов для персонала горной промышленности.
Можно сделать вывод, что использование функционально-структурной схемы при изучении работы оператора экскаватора позволяет повысить надежность и эффективность человека при управлении сложными техническими системами.
Библиографический список
- Сафин Г.Г., Абдрахманов А.А., Великанов В.С., Усов И.Г., Савельев В.И., Мацко Е.Ю. Групповая экспертная оценка деятельности операторов одним из методов теории принятия решений // Современные проблемы науки и образования, 2015, № 1 [Электронный ресурс]. URL: science-education.ru/121-18867
- Зенкевич С.Л., Ющенко А.С. Основы управления манипуляционными роботами // Москва: Издательство МГТУ им. Н.Э. Баумана, 2004.
- Сафин Г.Г., Абдрахманов А.А., Великанов В.С. Определение показателей надежности системы «оператор-горная машина-среда» методом функциональных сетей // Инженерный вестник Дона, 2014, №4 [Электронный ресурс]. URL: ivdon.ru/ru/magazine/archive/84N4y14
- Устюжанин, А. Д., Пупков, К. А. Динамическая идентификация и оценивание состояния человека-оператора в системах «человек – машина» //учеб. пособие – М.: РУДН, 2011. – 180 с.
- Сафин Г.Г. О новейших устройствах дистанционного управления техническими системами // Современные научные исследования и инновации. 2015. № 11 [Электронный ресурс]. URL: web.snauka.ru/issues/2015/11/58850
- Великанов В.С. Возможности метода парных сравнений в установлении значимости показателей горных машин и комплексов по критерию эргономичности // Вестник КузГТУ. – 2013. – № 4 – С. 43-46.
- Исмагилов К.В., Великанов В.С. Проектирование отечественных мехлопат с учетом требований рынка горной техники и эргономических показателей // Горный информационно-аналитический бюллетень. – М.: изд-во «Горная книга», 2009. – № 2. – С. 30-32.
- Великанов В.С. Развитие методов оценки и управления эргономичностью горных машин и комплексов на основе нечетко-множественного подхода // Европейская наука и техника. Сб. науч. тр. 2013. С. 370-377.
- Олизаренко В.В., Великанов В.С. К вопросу ранжирования профессиональных навыков машиниста карьерных экскаваторов // Горный информационно-аналитический бюллетень. – М.: изд-во «Горная книга», 2010. – № 3. – С. 315-319.