Современные морские суда характеризуются высокой степенью электрификации. Одна из основных тенденций развития судовой электроэнергетики – постоянный рост мощностей судовых электростанций и установленного электрооборудования. Средняя мощность электростанций морских судов удваивается каждые 20 лет. Мощность судовых электроэнергетических установок в настоящее время достигает десятков тысяч киловатт [1].
Процесс производства и передачи электроэнергии является столь динамичным и постоянно подверженным случайным возмущающим воздействиям, что без автоматического управления его функционирование невозможно. Такие параметры судовой электростанции, как напряжение, мощность и частота подвержены изменениям со стороны как внешних, так и внутренних воздействий, характеризующихся свойствами и характеристиками системы и ее компонентов, а также условиями окружающей среды.
В данной работе произведен выбор генератора. Наиболее распространенные типы генераторов: синхронный и асинхронный. Они имеют различия в конструкции, принципе работы, габаритах и т. д.
В качестве источников механической энергии применяются двигатели и турбины. Система, состоящая из первичного двигателя и генератора называется генераторным агрегатом (ГА).
Конструктивные особенности ГА составляют зависимость между параметрами первичного двигателя и генератора. Например, вал двигателя сопряжен с валом генератора. Таким образом, момент вращения вала двигателя определяет угол поворота вала генератора, что является наиболее важным критерием величины вырабатываемой генератором электроэнергии и устойчивости его работы.
Для управления значением напряжения и частоты вращения используют системы автоматического управления (САУ), которые различаются по принципу работы, точности и быстродействию. Однако любая САУ генератора и двигателя должна, в первую очередь, отрабатывать возмущения, которые оказывают влияние на напряжение и реактивную мощность.
Стоит иметь в виду, что семейство возмущающих воздействий достаточно велико. Помимо изменения или подключения нагрузки могут возникать рассогласования в работе генератора и выпадение его из синхронизма при параллельном подключении, некорректная работа системы возбуждения. Система возбуждения должна поддерживать параметры генератора в требуемых пределах. Огромное влияние на нормальную работу энергетической системы оказывает частота, которая также определяет значение напряжения сети.
Выработка электроэнергии зависит от тока питания, напряжения возбуждения и частоты вращения. Поэтому двигатель должен имеет соответствующее обслуживание для обеспечения генератора необходимой механической энергией.
В качестве объекта управления (ОУ) в статье выступает синхронный генератор переменного тока. Учтем, что частота вращения вала генератора от двигателя постоянна за счет функционирования САУ двигателем.
Выбранный тип генератора – синхронный, двигателя – дизель. Данные типы устройств выбраны с учетом их преимуществ по сравнению с другими типами семейств. Например, синхронный генератор обладает меньшими габаритами, шумом, простой, чем асинхронный. В свою очередь, дизель имеет больший КПД при соответствующем потреблении топлива, по сравнению с турбинами.
Рассмотрим математическую модель синхронного генератора. Можно сказать, что исследования, связанные с моделированием состоят из трех этапов работы [2]: построение модели; исследование ее поведения; оценка результатов исследований.
Схема замещения синхронной машины в системе координат связанной с ротором (q-d оси), использованная при создании модели, показана на рис. 1 [3].
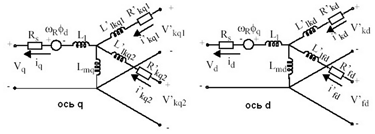
Рисунок 1 – Схема замещения синхронной машины
Все параметры ротора и его переменные приведены к статору. Индексы переменных и параметров обозначают следующее: d, q – проекции переменных на оси d и q; R, s – параметры ротора и статора; l, m – индуктивности рассеяния и цепи намагничивания; f, k – переменные цепи возбуждения и демпферной обмотки.
Приведенная на рис. 2 схема замещения описывается системой дифференциальных уравнений 6-го порядка [3]:

САУ включают в себя регуляторы или интеллектуальные регуляторы. Интеллектуальные регуляторы начали внедряться относительно недавно. Управление на базе нечеткой логики позволяет сформировать алгоритм, воспроизводящий действия инженера на основе накопленного опыта.
На рис. 2 представлена общая схема нечеткого регулятора. Нечеткий регулятор содержит три основных части: блок фаззификации, базу правил, блок дефаззификации [4].
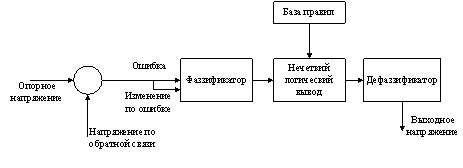
Рисунок 2 – Структурная схема нечеткого регулятора
Нечеткая логика использует лингвистические переменные вместо числовых переменных. В системе управления в закрытом контуре, ошибка между опорным и выходным напряжением и скорость изменения ошибки можно обозначить как близкая к нулю (ZE), положительная небольшая (PS), отрицательная небольшая и т.д. (табл. 1)[5].
Таблица 1 – Основные термы лингвистических переменных
|
Символическое обозначение |
Англоязычная нотация |
Русскоязычная нотация |
|
NL |
Negative Large |
Отрицательное большое |
|
NM |
Negative Middle |
Отрицательное среднее |
|
NS |
Negative Small |
Отрицательное малое |
|
ZE |
Zero |
Нуль, близкое к нулю |
|
PS |
Positive Small |
Положительное малое |
|
PM |
Positive Middle |
Положительное среднее |
|
PL |
Positive Large |
Положительное большое |
Лингвистическая переменная “Напряжение”: NL – напряжение отрицательное большое; NM – напряжение отрицательное среднее; NS – напряжение отрицательное малое; ZE – напряжение близко к нулю; PS – напряжение положительное малое; PM – напряжение положительное среднее; PL – напряжение положительное большое.
Лингвистическая переменная “Скорость изменения напряжения”: NL – скорость изменения напряжения отрицательное большое; NM – скорость изменения напряжения отрицательное среднее; NS – скорость изменения напряжения отрицательное малое; ZE – скорость изменения напряжения близко к нулю; PS – скорость изменения напряжения положительное малое; PM – скорость изменения напряжения положительное среднее; PL – скорость изменения напряжения положительное большое.
Лингвистическая переменная “Ток поля”: NL – ток поля отрицательное большое; NM – ток поля отрицательное среднее; NS – ток поля отрицательное малое; ZE – ток поля близко к нулю; PS – ток поля положительное малое; PM – ток поля положительное среднее; PL – ток поля положительное большое.
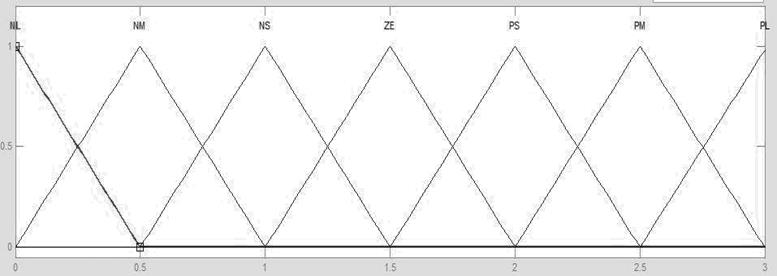
На рис. 3 приведены функции принадлежности. Данные функции принадлежности построены в пакете Fuzzy Logic Toolbox программы MATLAB.
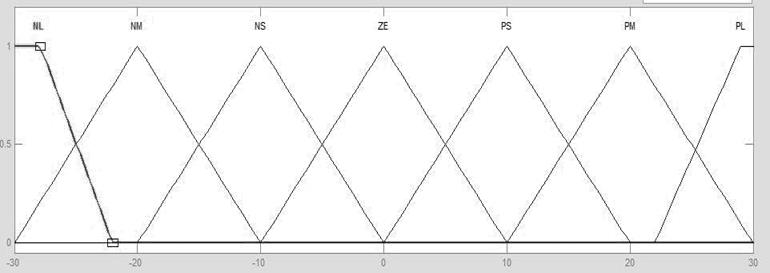
а)
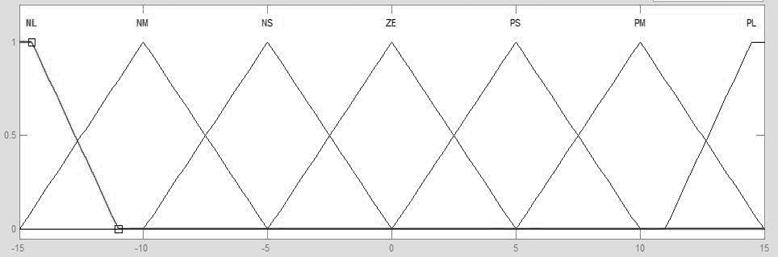
б)
в)
Рисунок 3 – Функции принадлежности “Напряжение” (а), “Скорость изменения напряжения” (б), “Ток поля” (в)
Входы преобразованы в данные функции принадлежности. Принадлежность может принимать значение от нуля до единицы для каждого лингвистического терма.
В этой статье используется метод Мамдани. Семь функций принадлежности были использованы для приведения к 49 правилам в базу правил (табл. 2).
Таблица 2. База правил
|
Напряжение |
||||||||
|
Скорость изменения напряжения |
NL |
NM |
NS |
ZE |
PS |
PM |
PL |
|
|
NL |
PL |
PL |
PL |
PL |
PM |
PS |
ZE |
|
|
NM |
PL |
PL |
PM |
PM |
PS |
ZE |
NS |
|
|
NS |
PL |
PM |
PS |
PS |
NS |
NM |
NL |
|
|
ZE |
PL |
PM |
PS |
ZE |
NS |
NM |
NL |
|
|
PS |
PL |
PM |
PS |
NS |
NS |
NM |
NL |
|
|
PM |
PM |
ZE |
NS |
NM |
NM |
NL |
NL |
|
|
PL |
ZE |
NS |
NM |
NL |
NL |
NL |
NL |
|
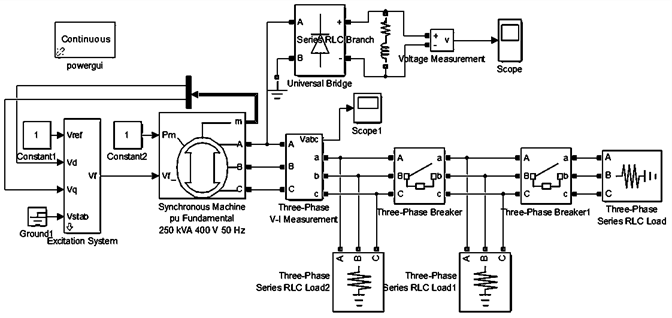
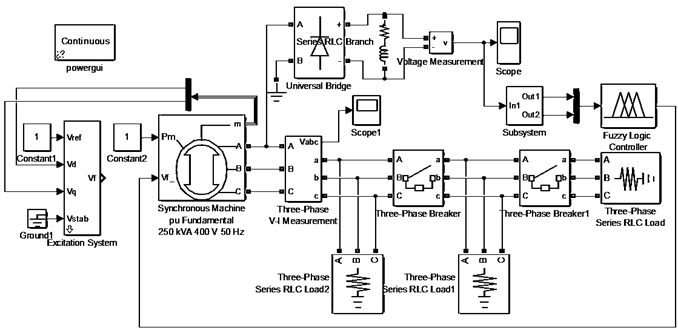
Собрана модель синхронного генератора с нагрузкой, системой возбуждения и регуляторами в пакете Simulink MATLAB. В качестве источника мощности генератора принят дизель. Моделирование проведено с использованием нечеткого регулятора и без него (рис. 4).
а)
б)
Рисунок 4 – Модели энергетической системы без нечеткого регулятора (а) и с нечетким регулятором (б)
Первая модель содержит регулятор на базе выпрямителя и RC-цепи. Вторая имеет тот же регулятор в контуре по возмущению, а в контуре по отклонению – нечеткий регулятор, который выпрямляет напряжение до требуемого значения путем изменения тока поля.
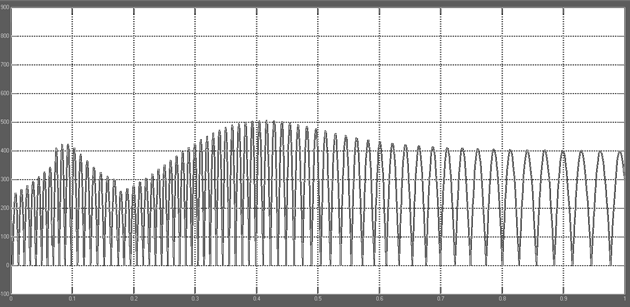
Результаты моделирования показаны на рис. 5.
а)
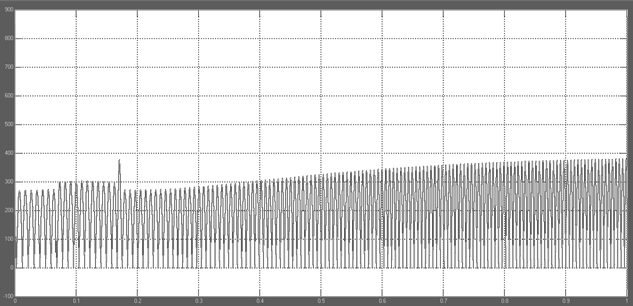
б)
Рисунок 5 – Результаты моделирования без нечеткого регулятора (а) и с нечетким регулятором (б)
На графике (а) видно, что выпрямитель отрабатывает влияние нагрузки, и амплитуда напряжения достигает 400 В, что является номинальным значением в исходной энергетической системе. Однако перерегулирование переходного процесса не удовлетворяет условию устойчивости системы, что не позволяет обеспечивать нормальный режим работы системы.
На графике (б) перерегулирование минимально благодаря нечеткой логике. Амплитуда напряжения при этом близка к номинальному значению.
В ходе исследований разработана модель с системой регулирования напряжением сети при подключенной нагрузке. Система промоделирована с нечетким регулятором и без него.
Таким образом, результаты моделирования показали, что нечеткий регулятор способен отрабатывать возмущения в системе благодаря широким возможностям управления и может использоваться как основной или дополнительный контур регулирования параметров энергетической системы.
Библиографический список
- Хайдуков, О. П. Эксплуатация электроэнергетических систем морских судов / О. П. Хайдуков, А. Н. Дмитриев, Г. Н. Запрожцев // Издательство “Транспорт”. – 1988. – 223 с.
- Zeljko, S. Synchronous generator modeling using Matlab / S. Zeljko, M. Vedrana, K. Vedrana, J. Vedrana // Department of Electromechanical Engineering, Faculty of Electrical Engineering, University of Osijek, Croatia. – 6 p.
- Niketa, N Design and modeling of fuzzy logic based voltage controller for an alternator / Niketa N, Shantharama Rai. C // International Journal of Recent Technology and Engineering (IJRTE). – 2013. – Vol. 2. – № 2. – Pp. 155-158.
- LaMeres, Brock J. Design and implementation of a fuzzy logic-based voltage controller for voltage regulation of a synchronous generator / Brock J. LaMeres // Montana State University. – 9 p.
- Соловьев, В. В. Моделирование нечетких систем управления / В. В. Соловьев, В. В. Шадрина // Таганрог: Изд-во ТТИ ЮФУ. – 2010. -125 с.