

Задачей разработанного макета является моделирование различных процессов производства. Данный макет предназначен для более твердого понимания необходимости разработки алгоритмов в технологических процессах. Также благодаря макету студенты, или обучаемый персонал, получают необходимые навыки в написании алгоритмов, благодаря тому, что после составления они могут проверить его на данном макете, и если в алгоритме присутствует ошибка, то студент может на макете увидеть, к чему это приведет.
Так же данный макет призван приучить студентов к обращению с техникой, так как данный макет требует технического обслуживания, а так же имеет определенные правила его использования. Это и подготовит студента к работе с более дорогостоящими устройствами, которая неизбежна в дальнейшей профессиональной деятельности.
В процессе проектирования была разработана мехатронная система, которая состоит с двух шаговых электродвигателей, которые приводятся в движение при помощи LPT-порта и в свою очередь осуществляют движение двух платформ. Первая движется при помощи системы зубчатых колес и зубчатой рейки. А вторая — при помощи зубчатого колеса, которое передает момент на зубчатую рейку.
Макет состоит из таких основных частей:
1- блок управления шаговыми двигателями;
2- зубчатое колесо, осуществляющее передачу момента с шагового двигателя на движущуюся платформу;
3- датчик конечного положения платформы первого привода;
4- датчик начального положения платформы первого привода;
5- платформа первого привода;
6- платформа второго привода;
7- датчик начального положения платформы второго привода;
8- магнит, которым замыкается геркон;
9- геркон, датчик промежуточно положения платформы;
10- датчик конечного положения платформы первого привода;
11- кабель подключения к LPT-порту.
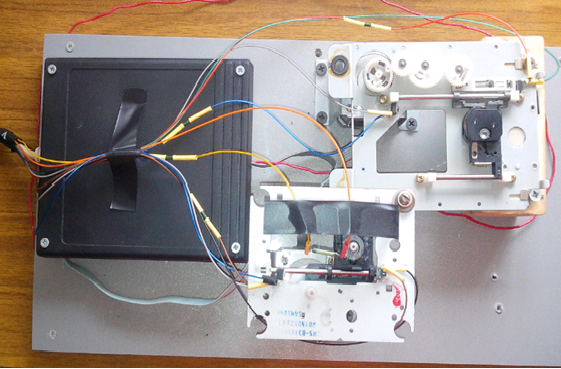
Рисунок 1 – устройство макета
Работа макета начинается с того что на компьютер подаются входные параметры, то есть программно создается алгоритм работы макета, задаются скорости движения платформ на каждом из 5 участков.
После задания входных параметров с блока питания подается напряжения на схему управления шаговыми двигателями, и со схемы управления подаются сигналы на шаговые двигатели, которые приводят в движения движущееся платформы, которые в свою очередь производят воздействие на датчик. С датчиков снимается сигнал и подается на компьютер, эти сигналы обрабатываются и вносят изменения в работающий алгоритм.
Данный макет создан в основном для циклических алгоритмов, и завершения выполнения алгоритма должно решаться программно.
Программное обеспечение разрабатывалось в среде Delphi 7. В разработанной программе можно поочередно проверить работу каждого двигателя, что бы убедится в работоспособности макета.
Так же благодаря разработанному программному обеспечению макета можно управлять скоростями двигателей, как вовремя проверки работоспособности макета, так и вовремя выполнения запрограммированного алгоритма.

Рисунок 2 – рабочее окно программного обеспечения
В области «Двигатель 1» производится проверка на работоспособность первого двигателя, В области «Двигатель 2» – второго двигателя.
В области «алгоритмы» задаются скорости движения на каждом участке макета. По нажатию на кнопку «алгоритм» производится работа алгоритма написанного для демонстрации работы макеты, для разработки собственного алгоритма, предназначена кнопка «Разработанный алгоритм».
Двигатели 1 и 2 могут работать в реверсном режиме с различной скоростью вращения вала. Значение скорости вращения и направление вращения задается компьютером посредством информации управления. Датчики Д11, Д12, Д13, Д21, Д22 являются датчиками начального, промежуточного и конечного положения приводов 1 и 2. Они потребляют энергию от блока питания и выдают сигналы при прохождении мимо них приводов 1 и 2.
С использованием кнопок старта Sst и имитации Sim модель включаются в работу. При повторном нажатии кнопки Sst функционирование модели прекращается. При каждом нажатии кнопки Sim цикл управления объектом повторяется.
Шаговые двигатели были выбраны исходя из того, что они имеют достаточную мощность, и ими наиболее удобно управлять при помощи параллельного порта (LPT). А также в дальнейшем совершенствовании макета можно будет отслеживать положение движущейся платформы не только по датчикам, но и по количеству импульсов поданных на двигатель, так как двигатель поворачивается, при подаче импульса, на один и тот же угол.
Датчиками контролирующие положение платформ в начальном и конечно положении были выбраны концевые выключатели, так как это наиболее простой и надежный способ контроля положения платформ.
Промежуточным датчиком положения был выбран геркон, он был выбран так же из за надежности, относительной дешевизны по сравнению с другими датчиками, и самое главное контроль промежуточно положения платформы осуществляется без непосредственного контакта с ней. Это делалось с той целью, что на реальном производстве может возникнуть ситуация, что на промежуточном этапе движения платформы она не должна иметь контакта с другими механизмами.
Библиографический список
- Коновалов Д. И. публикация «Макет для моделирования функционирования мехатронных систем в учебном процессе»: всеукраинская научно-техническая конференция «Интегрированные компьютерные технологии в машиностроении»/ ИКТМ 2012 тезисы докладов том 2 – Х.: Нац. аэрокосм. ун-т «Харк. авиац. ин-т», 2012. — 42 с.
- Благодарный Н.П. Элементы и узлы мехатронных комплексов компьютерно-интегрированных производств : учеб. пособ. / Н.П. Благодарный, И.П. Внуков, Г.М. Тимонькин. — Х.: Нац. аэрокосм. ун-т «Харк. авиац. ин-т», 2010. — 160 с.
- Геращенко А. Н. Пневматические, гидравлические и электрические приводы летательных аппаратов на основе волновых исполнительных механизмов / А. Н. Геращенко, С. Л. Самсонович. – М.: Машиностроение, 2006.- 392 с.
- Капустин Н. М. Автоматизация машиностроения / Н. М. Капустин, Н.П. Дьяконова П. М. Кузнецов. – М.: Высшая школа, 2002. – 224 с.
- Черпаков Б. И. Автоматизация и механизация производства / Б. И. Черпаков Л. И. Вереина. – М.: Академия, 2004. – 384 с.
Количество просмотров публикации: Please wait