Парапланеризм – это развивающийся вид спорта, в котором нужно управлять парапланом, приобрел среди любителей новых ощущений широкую популярность. Параплан – представляет собой очень легкий безмоторный пилотируемый летательный аппарат, планер с мягким 2-х болочковым крылом, надуваемым через воздухозаборники набегающим потоком воздуха. Полеты на параплане может совершать любой человек, так как это не требует специальной спортивной подготовки, но привлекает многих своей зрелищностью и возможностью парить над землей.
Одной из основных задач при воздухоплавании является навигация, а при использовании безмоторных аппаратов, зависящих от восходящих и нисходящих потоков воздуха, необходимо также определять границы потоков и значения скороподъемности. Здесь на помощь приходит полетный компьютер.
Моя работа предполагает разработку специализированного блока сенсоров и программного обеспечения для смартфона, позволяющего использовать его в качестве полетного компьютера. Программное обеспечение будет обеспечивать фильтрацию поступающих с сенсоров данных, а так же их слияние и отображение в удобном интерфейсе. Такое применение значительно расширяет возможности полетных компьютеров по сравнению со специализированными. В ходе работы предполагается решить следующие научные задачи: подбор оптимального по критерию минимизации ошибки типа фильтра Калмана для фильтрации данных с сенсоров, слияние данных GPS/ГЛОНАСС, барометра и блока инерциальной навигации.
Существуют специализированные полетные компьютеры, обладающие определенным функционалом, которые позволяют измерять и отображать:
- скорость изменения высоты (скороподъемность);
- высота полёта (фактическая и над уровнем моря);
- измерение температуры;
- ориентирование на местности с использованием карты;
- измерение скорости ветра;
- скорость движения относительно земли.
На рынке существует большое количество полетных компьютеров разных производителей. На рисунке 1 представлены одни из самых популярных и цены на них. Причем в зависимости от функций и формируется конечная цена. Например, если в полетном компьютере есть система навигации, то такие компьютеры будут иметь цену уже от 300 евро, а это примерно 20тыс рублей. Не все могут себе позволить покупать специализированные полетные компьютеры, но без них полет становится небезопасным.

Рисунок 1 – Производители и цены на полетные компьютеры
У меня возникла идея создания программно-аппаратного комлпекса на базе смартфона, который решит эту проблему.
Данный разрабатываемый комплекс включает в себя:
- сам смартфон или планшет на базе Android OS со специализированным программным обеспечением (ПО), которое будет разработано. В качестве ПО также будет возможность использовать сторонние ПО, такие как Xcsoar или Xctrack, но с рядом ограничений.
- специализированный блок сенсоров – это небольшое устройство, размера примерно 5х3х1.5 см. Планируется выпуск нескольких версий креплений: можно крепить на запястье (особенно актуально для парапланеристов), а также если используются в планерах – то креплениие в кабине пилота.
Связь со смартфоном возможна с помощью Bluetooth или USB. Внешний блок сенсоров будет включать в себя:
- блок инерциальной навигации в составе: акселерометр, гироскоп, магнетометр (IvenSense MPU-9250);
- высокоточный барометр (STMicroLPS25HB);
- микроконтроллер;
- батарея.
Прототип блока сенсоров представлен на рисунке 2.
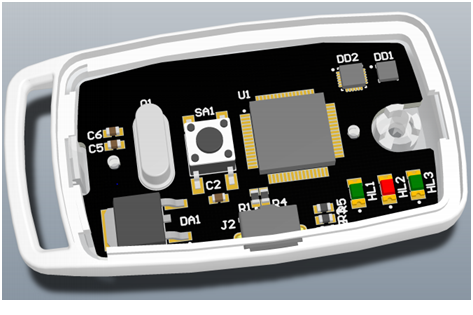
Рисунок 2 – Прототип блока сенсоров
Как и было сказано ранее, в рамках данной работы будет реализовано специализированное ПО на базе Android OS. Прототип данного ПО представлен на рисунке 3.
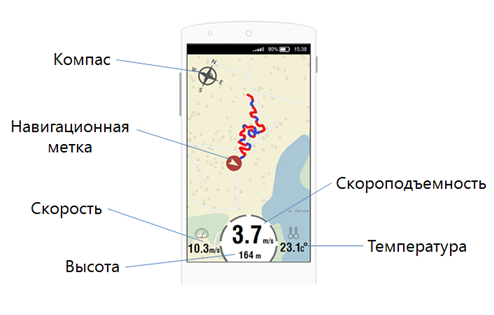
Рисунок 3 – Прототип специализированного ПО
Интерфейс в отличие от существующих ПО (таких как Xcsor, Xctrack) более дружелюбный и простой для использования конечными пользователями. Основные характеристики расположены в центре экрана. Маршрут, который прорисовывается на экране позволяет анализировать входные данные: красным цветом отображаются восходящие потоки, а синим нисходящие (т.е. тот момент, когда параплан двигался вниз). Также ПО позволяет записывать данные полетов и сохранять сам маршрут полета. При этом количество записей неограниченно, ограничение только во внутренней памяти используемого смартфона/планшета.
Любой измерительный прибор обладает некоторой погрешностью, на него может оказывать влияние большое количество внешних и внутренних воздействий, что приводит к тому, что информация с него оказывается зашумленной (неточной). Чем сильнее зашумлены данные, тем сложнее обработать такую информацию.
Фильтр — это алгоритм обработки данных, который исключает шумы (или уменьшает их количество) и лишнюю информацию, которая негативно влияет на результат.
В рамках первого этапа работы было проведено сравнение различных фильтров, используемых во многих областях науки и техники.
Выбор пал в сторону фильтра Калмана. Данный фильтр является одним из самых популярных алгоритмов анализа и фильтрации данных. В фильтре Калмана есть возможность задать входную информацию о характере системе, связи переменных и на основании этого построить более точную оценку, но даже в простейшем случае (без ввода априорной информации) он показывает себя очень хорошо.
Работа фильтра состоит в следующем:
- Этап прогнозирования, когда прогнозируется, как будут вести себя величины (значения) в следующий момент времени (с учетом неточности).
- Далее происходит измерение величин.
- Анализируются прогнозируемые данные и те данные, которые были измерены на втором этапе.
- Корректируется механизм предположения (также с учетом неточности и зашумленности этой информации).
В результате проведения тестирования алгоритма фильтра Калмана был получен следующий результат, изображенный на рисунке 4.
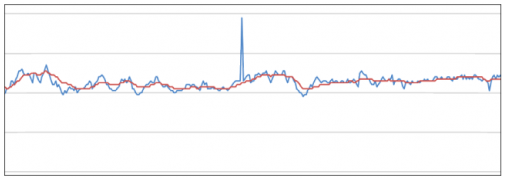
Рисунок 4 – Результат тестирования
,где:
- синяя линия – обрабатываемые значения;
- красная линия – результат работы фильтра Калмана.
В рамках исследования были проведены также тестирования и других алгоритмов: минимаксный фильтр, медианный фильтр и другие вариации фильтра Калмана. Но именно классический вариант фильтра Калмана показал наилучшие результаты.
В итоге схема программного комплекса изображена на рисунке 5. Входными данными являются: показатели с Инерциального измерительного блока (IMU), GPS/ГЛОНАСС, Барометар/высотомера. Далее эти показатели анализируются, обрабатываются и с помощью фильтра Калмана мы получаем данные с минимизированной погрешностью, которые передаются на блок расчета инерциальной навигации. Так мы получаем более точные выходные данные, такие как высота, местонахождение и скорость, которые мы уже видим на экране своего смартфона.
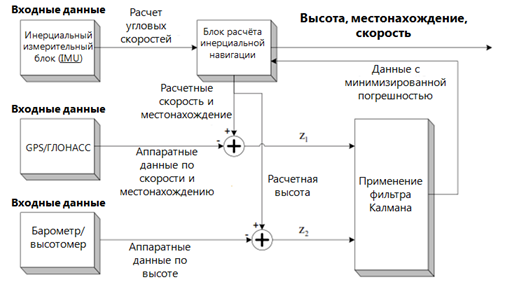
Рисунок 5 – Схема программной составляющей комплекса
Заключение
Цена разрабатываемого комплекса предполагается ниже, чем у всех текущих разработчиков полетных компьютеров. В отличие от конкурирующих устройств, разрабатываемый комплекс будет иметь более низкую цену за счет того, что основные операции выполняются на смартфоне (т.е. на стороне ПО), а также во внешний блок нет необходимо встраивать экран, так как все данные отображаются на смартфоне.
Кроме того, использование планшета в качестве полетного компьютера позволит отображать большее количество данных, поскольку планшет по сравнению с другими устройствами имеет большую диагональ.
Библиографический список
- Браммер К., Зиффлинг Г. Фильтр Калмана-Бьюси. Пер. с нем. – М.: Наука. Главная редакция физико-математической литературы. 1982.
- Сизиков В.С. Устойчивые методы обработки результатов измерений. Учебное пособие. – СПб.: «СпецЛит», 1999. – 240 с.
- Greg Welch, Gary Bishop. An Introduction to the Kalman Filter. TR 95-041, Department of Computer Science, University of North Carolina at Chapel Hill. April 5, 2004.
- Перов, А. И. Статистическая теория радиотехнических систем. — М.: Радиотехника, 2003. — 400 с. — ISBN 5-93108-047-3.
- Цыплаков, А. (2011) Введение в моделирование в пространстве состояний. — Квантиль, № 9, стр. 1—24.