

Погрузочные манипуляторы широко распространены в различных сферах производства. Основной характеристикой их наряду с грузоподъемностью является зона обслуживания, для расширения которой как правило оптимизируют геометрические параметры манипулятора. Ранее в работах [1, 2] рассматривалась схема манипулятора, особенностью которой является то, что введённый в механизм поворота колонны дополнительный гидроцилиндр увеличивает угол поворота стрелы в горизонтальной плоскости без глобальных перемещений самого погрузчика.
С целью расширения кинематических и динамических возможностей манипуляторов с поворотной стрелой и расширенной зоной обслуживания предлагается управление исполнительными приводами задавать по определенным программным движениям.
Для этого рассмотрим один приводной контур стрелы для определения аналогов угловых скоростей и ускорений воспользовавшись уравнением векторного контура (рис.1).

Рисунок 1 – Расчетная схема к определению аналогов скоростей и ускорений
![]() (1)
(1)
![]() (2)
(2)
Из уравнения (2) получаем

(3)
Подставляя выражение (3) в уравнение (2) получим

(4)
Возведём обе части равенства (4) в квадрат, имеем:
![]() (5)
(5)
откуда
 (6).
(6).
Зависимости угла поворота стрелы от действия одного гидроцилиндра представлена на рис.2, полученная в MathCad 14.
Аналог угловой скорости
 (7)
(7)

Рисунок 2 – Зависимость угла поворота колонны от удлинения гидроцилиндра
Аналог углового ускорения

(8)
В том же математическом процессоре MathCad дифференцированием выражения (6) получены аналитические выражения (7) и (8) аналогов угловых скорости и ускорения соответственно.
Перейдем от аналогов угловых скоростей и угловых ускорений к зависимостям угловых скорости и ускорения от времени.
Рассмотрим сначала линейный закон перемещения штоков гидроцилиндров, приняв следующий закон перемещения (рис. 3):
![]()
где t – текущее время движения, с;
Т – конечное время движения, T=2S/Vmax, с;
Tш=2,2 с, Тп=1,42 с.
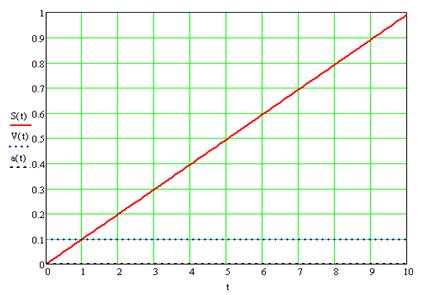
Рисунок 3 – Линейный закон программного движения штока гидроцилиндра
Тогда угол поворота рычага колонны

(9)
Закон изменения этого угла представлен на рис.4. Продифференцировав выражение (9) по времени получим зависимости угловой скорости от времени ω(t), и дифференцируя второй раз получим ε(t).

Рисунок 4 – Зависимость угла поворота колонны от времени при линейном законе программного перемещения.
Однако, как видно из графика (рис.5) в момент трогания гидродвигателя, скорость его штока уже должна иметь некоторое значение, отличное от нуля, что на практике не возможно реализовать. Следовательно необходимо задавать другой закон движения, при котором начальные значения скорости и ускорения равнялись бы нулю.

Рисунок 5 – Зависимость угловых скорости и ускорения колонны от времени при линейном законе программного перемещения.
Зададим закон движения штоков исполнительных цилиндров исходя из условия «мягкого касания» [3], при котором скорость и ускорение в начальный и конечный моменты времени равны нулю.
Такому требованию удовлетворяет синусоидальный закон программного движения звена (рис. 6)

(10)
где t – текущее время движения, с;
Т – конечное время движения, с.

Рисунок 11 – Зависимость угла поворота колонны от времени при синусоидальном законе перемещении штока.

Рисунок 12 – Зависимость угловой скорости колонны от времени при синусоидальном законе перемещении штока.
Графические зависимости угловых перемещений, скорости и ускорения стрелы манипулятора при синусоидальном законе движения штока, полученные в MathCad и представлены на рис. 11, 12 и 13 соответственно.

Рисунок 13 – Зависимость углового ускорения колонны от времени при синусоидальном законе перемещении штока.
Для удобства реализации различных законов движения штоков гидроцилиндров удобнее использовать выражения, где скорость штока задана в явном виде:
угловая скорость колонны
 (11).
(11).
угловое ускорение

(12).
Как видно из графиков (рис. 12 и 13) при синусоидальном законе движения штока исполнительного цилиндра угловые скорость и ускорения плавно увеличивается от нуля, а затем плавно уменьшается к моменту остановки. Такой режим работы обеспечивает минимальные инерционные нагрузки. Следовательно, синусоидальный закон перемещения штока обеспечивает наименее динамичные режимы работы. Основная сложность реализации такого закона перемещения заключается в необходимости программного управления законом движения, которое возможно реализовать только с применением микропроцессорной техники.
Библиографический список
- Несмиянов И.А., Карева Н.В. Геометрический синтез механизма поворота стрелы манипулятора // Современные научные исследования и инновации. 2014. № 12. Ч. 1 [Электронный ресурс]. URL: http://web.snauka.ru/issues/2014/12/39830 (дата обращения: 20.07.2020).
- НЕСМИЯНОВ И.А., ВОРОБЬЁВА Н.С., ТУРЫГИН П.В. КИНЕМАТИЧЕСКИЕ ОСОБЕННОСТИ ПОГРУЗЧИКА С ПОСЛЕДОВАТЕЛЬНЫМ СОЕДИНЕНИЕМ ГИДРОЦИЛИНДРОВ В МЕХАНИЗМЕ ПОВОРОТА СТРЕЛЫ // Современная техника и технологии. 2012. № 6 [Электронный ресурс]. URL: http://technology.snauka.ru/2012/06/1157 (дата обращения: 07.02.2019).
- Жога, В.В. Задача позиционирования манипулятора параллельно-последовательной структуры с управляемым захватным устройством [Текст] / В.В. Жога, В.В. Дяшкин-Титов, И.А Несмиянов., Н.С. Воробьева // Мехатроника, автоматизация, управление. – 2016. – Т. 17. -№ 8. – С. 525-530.
Количество просмотров публикации: Please wait