

Предложенное изобретение относится к машиностроению, в частности, к преобразователям механического движения, основанным на них двигателям, транспортным средствам и электрогенераторам. Может применяться в двигателестроении, автомобилестроении, электроэнергетике и других областях.
Известен двухтактный двигатель с бесконтактным магнитным преобразователем возвратно-поступательного движения во вращательное [1], [2], содержащий:
- пару роторов, вращающихся противоположно друг другу, с закрепленными на указанных роторах магнитами роторов,
- пару штоков, движущихся возвратно-поступательно противоположно друг другу вдоль оси вращения роторов, с закрепленными на указанных штоках магнитами штоков,
- корпус и подшипники,
- одноименные полюса магнитов роторов, обращенные к штокам, расположены вдоль линий на цилиндрических рабочих поверхностях, имеющих в направлении оси вращения ротора, по крайней мере, один локальный максимум и один локальный минимум,
- указанные линии таковы, что когда полюса магнитов одного штока достигают в крайней точке своего движения областей локальных максимумов указанных линий одного ротора, полюса магнитов другого штока также достигают крайней точки своего движения, но в областях локальных минимумов указанных линий этого же ротора.
Недостатком указанного решения является то, что удельная по весу сила взаимодействия магнитов роторов и штоков невелика. Это связано с малой площадью взаимодействия полюсов и приводит к громоздкости двигателя и высокой удельной по мощности двигателя стоимости магнитов. Каждый магнит ротора или штока участвует в силовом взаимодействии только одним своим полюсом, так как только один полюс выведен на цилиндрическую рабочую поверхность.
Известны преобразователи возвратно-поступательного движения во вращательное движение [3], [4], [5], [6], также использующие взаимодействие движущихся возвратно-поступательно магнитов штоков и вращающихся волнообразных магнитов роторов. Однако и здесь протяженные в радиальном направлении магниты имеют небольшую поверхность взаимодействия друг с другом, и как следствие низкую эффективность.
Необходимо подчеркнуть, что все известные аналоги имеют только две цилиндрические рабочие поверхности, на которых происходит передача мощности от штока к ротору, а именно это одна цилиндрическая рабочая поверхность штока и одна цилиндрическая рабочая поверхность ротора. Эти поверхности ограничивают воздушный зазор между магнитами штоков и магнитами роторов.
Технический результат изобретения заключается в создании бесконтактного магнитного преобразователя возвратно-поступательного движения во вращательное движение, с движущимися противоположно друг другу штоками и противоположно вращающимися роторами, который может использоваться в двигателе внутреннего сгорания, который в свою очередь используется в генераторной установке и/или транспортном средстве.
Преобразователь возвратно-поступательного движения во вращательное движение, содержащий:
- пару роторов, вращающихся противоположно друг другу, с закрепленными на указанных роторах магнитами роторов,
- пару штоков, движущихся возвратно-поступательно противоположно друг другу вдоль оси вращения роторов, с закрепленными на указанных штоках магнитами штоков,
- корпус и подшипники,
- одноименные полюса магнитов роторов, обращенные к штокам, расположены вдоль линий на цилиндрических рабочих поверхностях, имеющих в направлении оси вращения ротора, по крайней мере, один локальный максимум и один локальный минимум,
- указанные линии таковы, что когда полюса магнитов одного штока достигают в крайней точке своего движения областей локальных максимумов указанных линий одного ротора, полюса магнитов другого штока также достигают крайней точки своего движения, но в областях локальных минимумов указанных линий этого же ротора,
отличающийся тем, что, по крайней мере, часть магнитов роторов и/или магнитов штоков выведены полюсами одновременно на несколько концентрических цилиндрических рабочих поверхностей.
Указанная замкнутая линия может представлять собой непрерывную кривую, ломаную или их комбинацию. Линия является воображаемой и отражает зону действия полюсов магнита ротора. Из соображений конструктивной простоты лучше использовать ломаную кривую, состоящую из эллиптических дуг. Указанная ломаная кривая образуется сечением цилиндрической рабочей поверхности плоскостями.
Штоки движутся всегда с одинаковой амплитудой в противофазе, т.е. в противоположных направлениях, одновременно достигая крайних положений своего движения, что должно обеспечиваться внешним к преобразователю синхронизатором или конструкцией двигателя, где преобразователь используется.
Указанная линия должна быть такой формы, чтобы, когда полюса магнитов одного штока достигают локальных максимумов линии полюсов ротора, полюса магнитов другого штока – локальных минимумов указанной линии того же ротора. В таком случае при движении штоков будет создаваться вращающий момент на роторе.
Под локальным минимумом и локальным максимумом понимаются соответственно локальный минимум и локальный максимум по оси Z, совпадающей с осью ротора трехмерной функции, во всех точках совпадающей с указанной замкнутой линии.
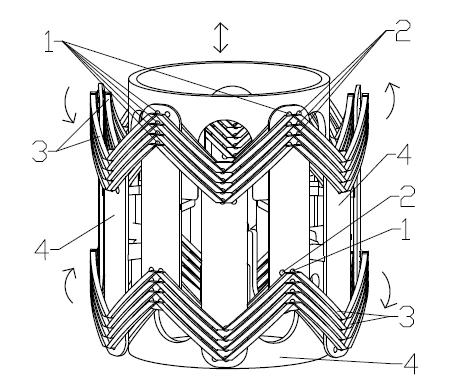
ФИГ.1 Магнитная система преобразователя с магнитами штоков 1, дополнительными магнитами штоков 2, расположенными на штоках 4, движущимися возвратно-поступательно, что обозначено двойной стрелкой. Магниты роторов 3 вращаются вместе с роторами (на Фиг.1 не показаны) в соответствующих направлениях (показаны стрелками). Штоки 4 состоят из цилиндрической части, обеспечивающей скольжение по направляющей и изогнутых пластин, на которых непосредственно закреплены магниты штоков 1 и дополнительные магниты штоков 2.
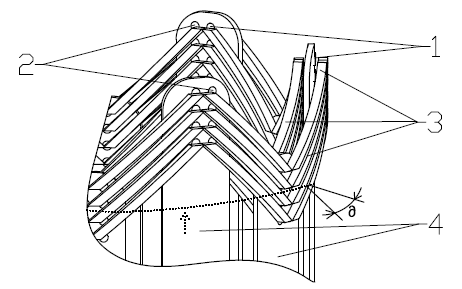
ФИГ.2 Увеличенная часть магнитной системы с магнитами штоков 1, дополнительными магнитами штоков 2, на штоках 4 и вращающимися вместе с роторами (на Фиг.2 не показаны) магнитами роторов 3. Показан угол ∂ между краями полюсов магнитов ротора в плоскости перпендикулярной оси ротора, который будем называть угловым межполюсным расстоянием. Плоскость сечения указана пунктиром, вид указан пунктирной стрелкой. Сечение будет показано на Фиг.3
Все магниты имеют преимущественно радиальную намагниченность, т.е. вектор магнитной индукции, создаваемой магнитами штоков и магнитами роторов, направлен вдоль радиуса в каждой точке магнита. При другом типе намагниченности эффективность работы преобразователя снижается.
Подшипники, в том числе направляющие штоков, могут быть использованы любые – качения, скольжения, магнитные и т.д. В отдельных случаях роль подшипника могут играть части других узлов, например, корпуса.
Штоки должны двигаться на направляющих, а ротор – вращаться на подшипниках, не дающих ему в рабочем режиме (режиме передачи мощности) возможности перемещаться поступательно вдоль оси движения штока. Оси вращения роторов и оси возвратно-поступательного движения штоков должны совпадать.
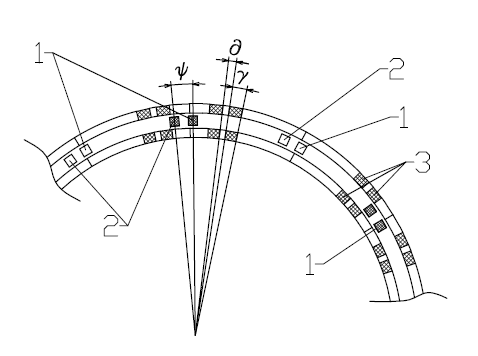
ФИГ.3 Сечение магнитов роторов 3, магнитов штоков 1 и дополнительных магнитов штоков 2 в плоскости перпендикулярной оси роторов. Показан угол ∂, а также угол видимости магнита ротора γ и угловое расстояние между магнитом штока и дополнительным магнитом штока ψ. Штоки на Фиг.3 не показаны. Сечение указано пунктиром на Фиг.2, вид по пунктирной стрелке (снизу).
Под цилиндрической рабочей поверхностью понимается поверхность, на которую выведены полюса магнитов штоков или магнитов роторов, взаимодействующих через небольшой воздушный (или газовый в случае произвольной газовой среды) зазор с полюсами магнитов роторов или магнитов штоков соответственно. Концентрические цилиндрические рабочие поверхности – это несколько цилиндрических рабочих поверхностей на одной оси, совпадающей с осью вращения роторов, но разными радиусами.
Главное отличие предлагаемого преобразователя от прототипа в том, что у него имеется более двух концентрических цилиндрических рабочих поверхностей, на которых происходит передача мощности от штоков к роторам посредством магнитного взаимодействия. Сила магнитного взаимодействия слабо зависит от глубины магнита в радиальном направлении, начиная с некоторой толщины магнита. Таким образом, для эффективного использования магнитов, надо увеличивать площадь поверхности взаимодействия, уменьшая глубину магнитов в радиальном направлении. В предлагаемом преобразователе это осуществляется выведением полюсов магнитов роторов и/или штоков одновременно на две концентрические цилиндрические рабочие поверхности. При этом в силовом магнитном взаимодействии, в отличие от прототипа, участвуют одновременно оба полюса магнита штока и/или ротора, выведенного сразу на две цилиндрические концентрические рабочие поверхности. Таким образом, можно увеличить силу магнитного взаимодействия магнитов штоков и роторов при том же (или меньшем) объеме магнитов штоков и роторов, по сравнению с прототипом. Это позволяет облегчить штоки, что в дальнейшем позволит поднять частоту и мощность двигателя на основе предлагаемого преобразователя.
В предлагаемом преобразователе цилиндрических концентрических рабочих поверхностей, как минимум, четыре, так как имеется, как минимум, два зазора. Например, магниты штоков выведены полюсами одновременно на две концентрические цилиндрические рабочие поверхности радиусами R1 и R2, и взаимодействуют через два зазора с полюсами магнитов роторов, выведенных полюсами на две концентрические цилиндрические рабочие поверхности радиусами R1 - ΔR и R2+ΔR, где ΔR – ширина зазора. В данном примере в качестве «средней» части магнитной системы выступают магниты штоков. Это удобно для применения в двигателе внутреннего сгорания. В качестве «средней» части магнитной системы можно использовать магниты роторов. Тогда магниты роторов будут выведены одновременно своими полюсами на две концентрические цилиндрические рабочие поверхности с радиусами R1 и R2, и будут взаимодействовать через зазоры с полюсами магнитов штоков, выведенных полюсами на две концентрические цилиндрические рабочие поверхности радиусами R1 - ΔR и R2+ΔR, где ΔR – ширина зазора. В общем случае суммарное количество концентрических цилиндрических рабочих поверхностей у предложенного преобразователя может быть 2N, где N – любое натуральное число, большее единицы. При N>2 выведенными одновременно на две концентрические цилиндрические рабочие поверхности оказываются как полюса магнитов роторов, так и полюса магнитов штоков, в силу того, что магниты роторов и магниты штоков для правильной работы преобразователя должны чередоваться в радиальном направлении.
Угловое направление и осевое направление вдоль оси штока понимаются соответственно как угол и координата в цилиндрических координатах, где ось координат направлена вдоль оси ротора.
Под углом видимости магнита ротора понимается угловое расстояние между краями магнита ротора в плоскости, перпендикулярной к оси ротора с вершиной угла в точке пересечения этой плоскости и оси ротора.
Аналогично, под углом видимости межполюсного промежутка магнитов ротора понимается угловое расстояние между краями соседних полюсов магнитов ротора в плоскости, перпендикулярной к оси ротора с центром в точке пересечения этой плоскости и оси ротора.
Под рабочим режимом преобразователя понимается режим передачи мощности от движущегося возвратно-поступательно штока к вращающимся роторам. В рабочем режиме магниты одного ротора, полюсами выведенные на разные концентрические цилиндрические рабочие поверхности, должны быть неподвижны друг относительно друга. Для достижения наибольшей магнитной силы, обращенные друг к другу полюса магнитов ротора, находящиеся на одном уровне по оси ротора, должны иметь противоположную полярность, а локальные максимумы и минимумы указанных линий одного ротора должны достигаться при одинаковых углах цилиндрической системы координат относительно оси роторов.
В случае двух зазоров в радиальном направлении, и соответственно, четырех концентрических цилиндрических рабочих поверхностей, возможно два варианта компоновки магнитной системы:
1) полюса магнитов ротора выведены одновременно на две концентрические цилиндрические рабочие поверхности, ротор вращается между движущимися возвратно-поступательно штоками, а полюса магнитов каждого штока выведены каждая на свою одну цилиндрическую рабочую поверхность, при этом обращенные друг к другу полюса магнитов одного штока имеют противоположную полярность на одном уровне по оси роторов;
2) полюса магнитов штоков выведены одновременно на две концентрические цилиндрические рабочие поверхности, ротор вращается вокруг движущихся возвратно-поступательно штоков, а полюса магнитов роторов выведены каждая на свою одну цилиндрическую рабочую поверхность, при этом обращенные друг к другу полюса магнитов одного ротора имеют противоположную полярность на одном уровне по оси роторов.
Полюса магнитов, противоположные выведенным на цилиндрическую рабочую поверхность, предпочтительно замыкать магнитопроводом для увеличения магнитного потока в воздушном зазоре, например, «спинка» ротора в указанном выше варианте 2) может быть выполнена из электротехнической стали.
Корпус и подшипники преобразователя должны обеспечивать указанные выше черты и взаимодействие частей преобразователя. В качестве корпуса или его элементов могут быть использованы другие элементы. Например, при использовании преобразователя в двигателе внутреннего сгорания корпусом может быть труба с цилиндрами, а поршни – скользящими направляющими штоков.
Магниты роторов имеют достаточно сложную форму, что удорожает их изготовление. Поэтому можно выполнять полюса роторов наборными с единым полюсным наконечником из материала с высокой магнитной проницаемостью, например, из электротехнической стали.
Раскрытое выше изобретение может быть изготовлено в различных модификациях, укажем особенности одной из них.
Модификация. Раскрытый выше преобразователь, обладающий указанными ниже в пп.1-5 дополнительными характеристиками.
1. Для, по крайней мере, одного магнита штока имеется дополнительный магнит штока, выведенный на ту же цилиндрическую рабочую поверхность полюсами противоположной полярности на том же уровне по оси ротора.
Дополнительный магнит штока устанавливается преимущественно на той координате по оси ротора Z (другими словами, на том же уровне по оси роторов) что и основной полюс. Максимальный вклад таких же по размеру дополнительных магнитов штоков в магнитное взаимодействие магнитов штоков и роторов равен вкладу магнитов штоков, поэтому можно добиться удвоения магнитной силы взаимодействия при неизменном объеме магнитов роторов.
2. Угловое расстояние дополнительного полюса штока от основного полюса штока равно сумме углов видимости от оси роторов полюса магнита ротора и межполюсного промежутка. При таком угловом расстоянии магнитная сила взаимодействия магнитов штоков и роторов наибольшая.
3. Магниты каждого штока одновременно взаимодействуют с магнитами обоих роторов. При такой компоновке магнитной системы при работе преобразователя используются магниты роторов, установленные как под одним (положительный наклон), так и под другим углом (отрицательный наклон) по отношению к плоскости перпендикуляра к оси ротора. При этом возрастает площадь взаимодействующих магнитных полюсов при неизменной конфигурации роторов. Соответственно, возрастает магнитная сила взаимодействия и максимальная передаваемая мощность.
4. Преобразователь имеет дополнительные полюса магнитов ротора, выведенные на ту же цилиндрическую рабочую поверхность полюсами той же полярности, как и полюса магнитов ротора, к которым дополнительные полюса магнитов ротора примыкают. Дополнительные полюса магнитов роторов необходимы для увеличения силы взаимодействия полюсов штоков и роторов при движении штоков вблизи мертвых точек. Примыкание этих дополнительных полюсов осуществляется через зазор, равный по линейному расстоянию межполюсному зазору, около «плато» магнитов роторов.
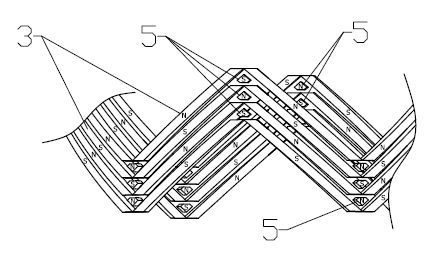
ФИГ.4 Магниты ротора 3 и дополнительные магниты роторов 5. Буквами S и N для примера обозначены полюса магнитов. Полюса могут быть расположены иначе. Намагниченность магнитов роторов 3, 5 а также штоков 1, 2 радиальная, то есть вектор магнитной индукции направлен к оси вращения или от оси вращения. Показаны только магниты внешней части одного ротора 6 (сам ротор на Фиг.4 не показан).
5. Магниты роторов могут при необходимости поворачиваться и/или сдвигаться друг относительно друга. Такая необходимость может возникнуть для выведения преобразователя из рабочего режима и перехода на «холостой» ход. Например, при сдвиге в осевом направлении одного из рядов магнитов ротора таким образом, что обращенные друг к другу полюса магнитов роторов имеют одинаковую полярность, суммарный магнитный поток в зазоре близок к нулю, и штоки осуществляют холостой ход, то есть движутся без связи с роторами. При выполнении части магнитов роторов с возможностью перемещения, например сдвига внутренней части ротора со всеми магнитами этой части ротора на расстояние длины магнита ротора и межполюсного зазора вдоль оси роторов, можно сделать суммарное силовое взаимодействие магнитов роторов и штоков близким к нулю. Действительно, если например, магниты роторов обращены одноименными полюсами к полюсам магнитов штоков для любой координаты Z (другими словами, на том же уровне по оси роторов), их суммарное магнитное поле близко к нулю. Таким образом, можно при необходимости выводить преобразователь из режима передачи мощности (рабочего режима). Это может потребоваться, например, как функция сцепления для переключения передачи механической коробки передач в транспортном средстве.
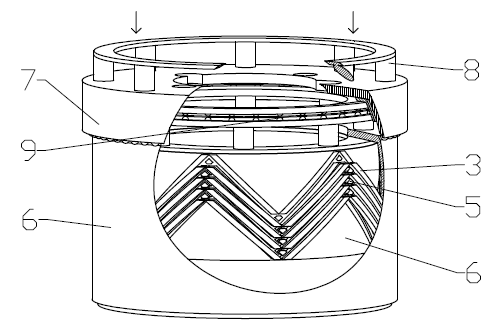
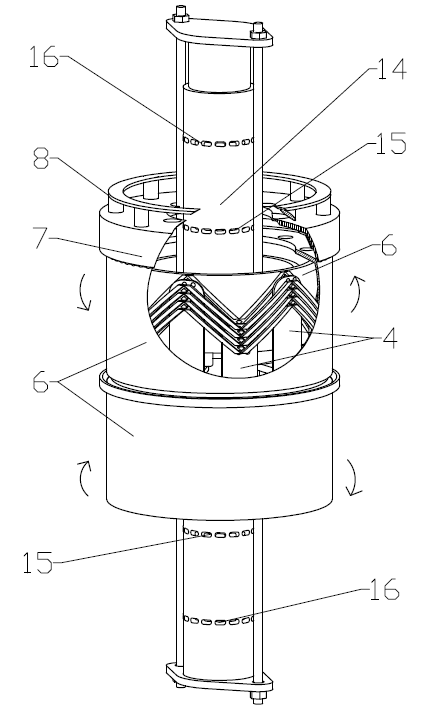
ФИГ.5 Один из роторов 6 с магнитами ротора 3 и дополнительными магнитами ротора 5, вращающийся относительно неподвижного корпуса 7. Внутренняя часть ротора 6 выполнена с возможностью сдвига вдоль оси вращения, посредством толкателя 8, соединенного с внутренней частью ротора 6 посредством опорного подшипника 9. На внутренней части ротора 6 количество рядов магнитов 3 в осевом направлении на один больше, чем на внешней части. Это необходимо для того, чтобы при сдвиге внутренней части ротора 6 вниз на расстояние высоты магнита ротора 3 и межполюсного промежутка в осевом направлении, магнитное поле от магнитов ротора 3 в области нахождения магнитов штоков 1 и 2 было близким к нулю. Штоки и магниты штоков на Фиг. 5 не показаны. Для наглядности в корпусе 7, наружной части ротора 6 и толкателе 8 сделан цилиндрический вырез. Направление сдвига (вниз) указано стрелками.
Двигатель, использующий описанный преобразователь, может быть как тепловым внутреннего или внешнего сгорания, так и, например, пневматическим или гидравлическим. При использовании в двигателе внутреннего сгорания удобнее использовать двухтактный цикл с самовоспламенением от сжатия.
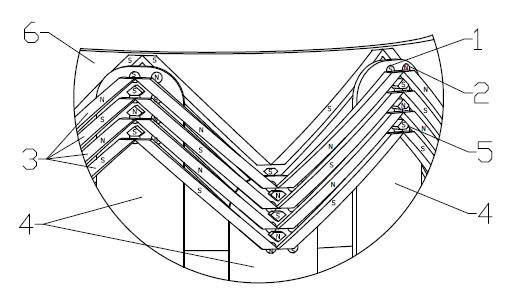
ФИГ.6 Вырез внутренней части ротора 6 с магнитами ротора 3 и дополнительными магнитами ротора 5, магниты 3 внешней части ротора 6 и дополнительные магниты внешней части ротора 6. Для наглядности внешняя часть ротора 6 не показана, а часть штоков 4 с магнитами штоков 1 и дополнительными магнитами штоков 2 показаны. Буквами S и N обозначены полюса магнитов. Направление намагниченности чередуется в направлении оси вращения.
На штоки устанавливаются поршни, например, из графита, для возможности работы без жидкой смазки. Цилиндры являются направляющими штоков (для некоторых частей штока могут быть и дополнительные направляющие).
Более эффективно использовать преобразователь по Модификации. При этом противоположно движущиеся поршни через штоки взаимодействуют одновременно с двумя противоположно вращающимися роторами, т.е. в рабочем режиме синхронизированы. Кроме того, более полно используются дорогостоящие магниты ротора, так как при каждом движении штоков задействованы оба наклона (положительный и отрицательный) указанных линий на цилиндрических поверхностях.
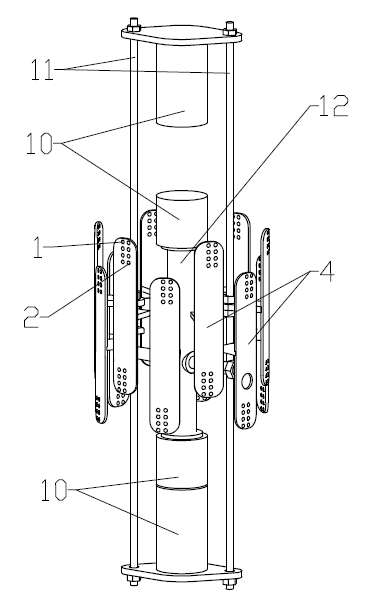
ФИГ.7 Часть двигателя с преобразователем: соединение наружных поршней 10 с тягами 11 и одним из штоков 4, а также соединение внутренних поршней 10 между собой соединителем поршней 12 и с другим штоком 4. Для наглядности цилиндрическая часть штоков 4 не показана
Двухтактный двигатель имеет два рабочих цилиндра на одной оси и две пары встречно-движущихся поршней с ограничителями хода поршней, прямоточную бесклапанную продувку. Два поршня двигателя жестко связаны с одним штоком преобразователя, а два других поршня соединены между собой и вторым штоком преобразователя.
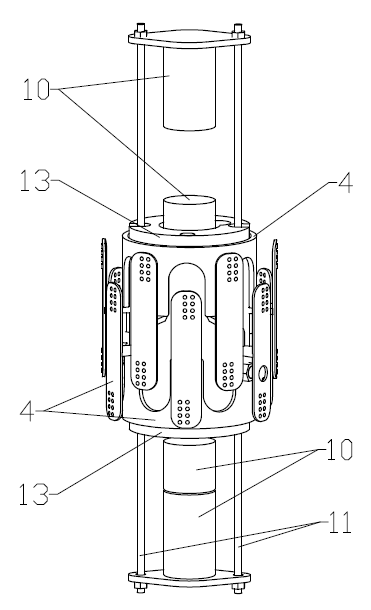
ФИГ.8 Часть двигателя с преобразователем: цилиндрические части штоков 4 и направляющая скольжения 13, поршни 10, тяги 11
Использование именно двух цилиндров двигателя обусловлено тем, что при использовании одного цилиндра двигателя не удается добиться устойчивой работы под нагрузкой, а при трех и более цилиндрах появляется необходимость добиваться одновременности начала сгорания в двух и более цилиндрах, а также повышается внутреннее трение поршней о цилиндры.
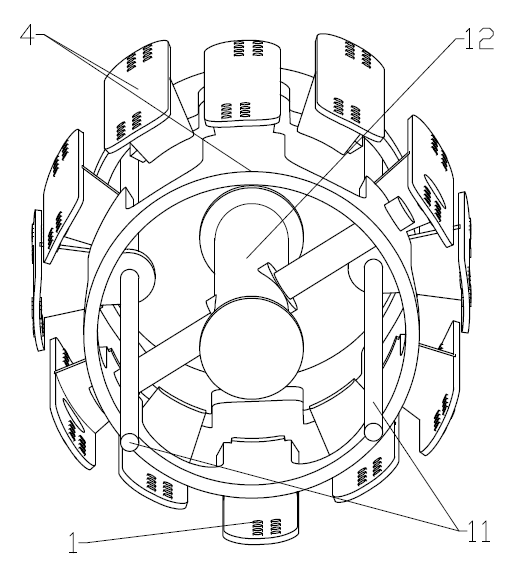
ФИГ.9 Часть двигателя с преобразователем: видна связь одного штока 4 с тягами 11, а другого штока 4 с соединителем внутренних поршней 12
Ограничители хода поршней предотвращают смещение точки максимального сближения поршней в цилиндре двигателя при выходе одного из штоков из синхронизации с роторами. В такой нештатной ситуации преобразователь должен вернуться в рабочий режим в течение одного хода штока.
ФИГ.10 Часть двигателя с преобразователем: цилиндр 14 с впускными 15 и выпускными 16 окнами. Нижняя часть корпуса 7 и цилиндрические части штоков с направляющими не показаны
При использовании графитовых поршней и цилиндра из прецизионного сплава с очень низким температурным коэффициентом линейного расширения в рабочем диапазоне температур двигателя (например, инвар), можно полностью отказаться от уплотнительных колец в двигателе.
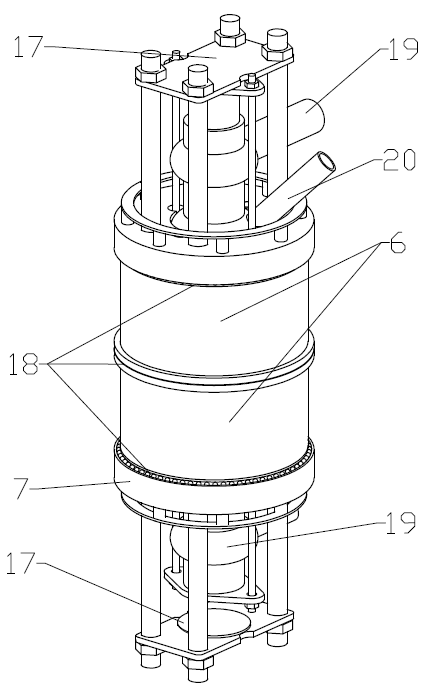
ФИГ.11 Общий вид двигателя с преобразователем: показаны ограничители хода поршней 17, подшипники роторов 18, выпускные коллекторы 19 и впускной коллектор 20
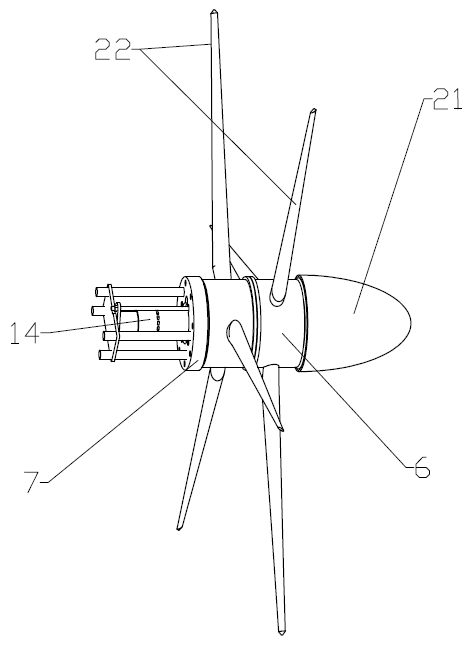
ФИГ.12 Двигатель в авиационном исполнении: показан обтекатель 21 и лопасти 22 установленные непосредственно на роторах 6. Впускной и выпускной коллекторы не показаны.
Для использования в авиации, на роторах преобразователя расположены лопасти воздушных винтов, а цилиндры двигателя расположены в трубе, являющейся корпусом преобразователя. Удобством такой конструкции двигателя является возможность установки противоположно вращающихся лопастей без редукторов.
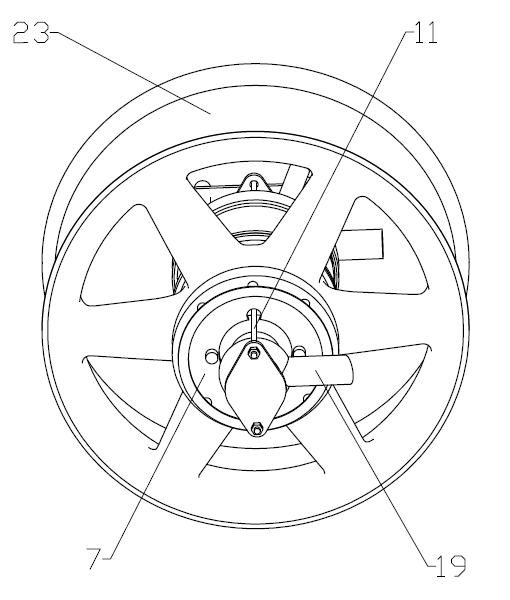
ФИГ.13 Двигатель в автомобильном исполнении: непосредственно на одном из роторов 6 установлен обод колеса 23
Для использования в сухопутном транспортном средстве, на роторе преобразователя закрепляется привод к коробке передач или колесо транспортного средства. Для использования в водном транспорте роторы преобразователей соединяются с гребными винтами посредством привода.
Генераторная установка, использующая двигатель на основе предлагаемого преобразователя, может иметь привод от роторов преобразователя или на роторы преобразователя могут быть непосредственно смонтированы роторы генератора. Также, магниты роторов могут использоваться для непосредственной генерации тока в обмотках статора.
Транспортное средство, использующее двигатель и/или генераторную установку с преобразователями по настоящему изобретению, может быть воздушным, водным, сухопутным.
Автомобиль, использующий двигатель на основе предлагаемого преобразователя, может иметь привод от роторов на коробку передач или непосредственно на колеса. Непосредственный привод более выгоден с точки зрения экономичности транспортного средства. Также автомобиль может использовать генераторную установку на основе предлагаемого двигателя и преобразователя для питания тяговых электромоторов и батарей.
Осуществление изобретения.
На Фиг. 1 представлена внутренняя часть одного из вариантов предложенного преобразователя. Магниты штоков 1 и дополнительные магниты штоков 2 через воздушный зазор взаимодействуют с магнитами роторов 3. Стрелками показано направление вращения магнитов роторов 3 и возвратно-поступательное движение штоков 4. Верхняя группа магнитов роторов 3 относится к одному ротору, нижняя – к другому ротору. Сами роторы, на которых закреплены магниты роторов, а также подшипники и корпус на Фиг.1 не показаны.
На Фиг.2 более крупно показана часть магнитов роторов 3, штоки 4 с магнитами штоков 1 и дополнительными магнитами штоков 2. Пунктирной линией показана линия сечения и стрелкой направление взгляда на сечение. Сечение показано на Фиг.3. Угол ψ является угловым расстоянием между магнитом штока 1 и дополнительным магнитом штока 2. Угол γ – это угловое расстояние между краями магнита ротора 3, другими словами, угол видимости магнита ротора 3 из точки на оси ротора в плоскости, перпендикулярной этой оси. Аналогично, угол ∂ - это угол видимости межполюсного расстояния магнитов ротора 3 из точки на оси ротора в плоскости, перпендикулярной этой оси. Для преобразователя по Модификации должно выполняться соотношение ψ = γ + ∂, при выполнении которого вклад в магнитную силу от взаимодействия магнитов роторов 3 и дополнительных магнитов штоков 2 максимален, так как магнитная сила от этого вклада направлена в ту же сторону, что и от взаимодействия магнитов роторов 3 и магнитов штоков 1.
На Фиг.4 показаны магниты 3 внешней части одного из роторов, а также дополнительные магниты 5 внешней части этого ротора. Буквами N и S указана полярность магнитов. Полярность может быть и другой, важно только, чтобы полярность магнитов ротора 3 чередовалась в направлении оси ротора, а полярность дополнительного магнита ротора 5 совпадала с полярностью магнита ротора 3, к которому он прилегает.
При движении штоков 4 возвратно-поступательно под действием внешней силы, магниты штоков 1 и дополнительные магниты штоков 2 (при их наличии), движутся относительно ротора между магнитами роторов 3 по равновесной траектории, зависящей от внешней нагрузки. При этом штоки 4, двигаясь навстречу друг другу или друг от друга, воздействуют на магниты роторов 3, заставляя их вращаться вместе с роторами.
Условной механической аналогией является взаимодействие по типу «винт-гайка», т.к. указанная линия полюсов магнитов роторов имеет определенные наклоны относительно плоскости, перпендикулярной к оси роторов. Наклоны могут быть плавно изменяющимися от положительного к отрицательному для волнистой линии полюсов магнитов роторов 3, или изменяющимися ступенчато (постоянно-положительный на постоянно-отрицательный с проходом через ноль) для ломаной указанной линии.
При взаимодействии магнитов штоков 1 и дополнительных магнитов штоков 2 обоих штоков 4 с обеими группами магнитов роторов 3 и дополнительных магнитов роторов 5, принадлежащих к вращающимся в противоположные стороны роторам, модули наклонов должны быть преимущественно одинаковыми в областях взаимодействия магнитов штоков 1 и магнитов роторов 3, а сами наклоны – противоположными. При таком взаимодействии максимально используются магниты роторов 3, и общая эффективность преобразователя увеличивается.
Минимум и/или максимум указанной линии полюсов магнитов роторов 3 может быть определенной продолжительности, типа “плато”, как показано на Фиг.1, 2 и 4. Это может дать возможность увеличить время нахождения штока 4 вблизи мертвых точек, например, для улучшения процессов газообмена в двигателе, использующем предлагаемый преобразователь. Кроме того, наличие «плато» увеличивает эффективность использования дополнительных полюсов штоков 2 при прохождении мертвых точек.
Роторы 6 вращаются в противоположные стороны, поэтому реактивные вращающие моменты компенсируются внутри каждого штока 4 и нет необходимости предотвращать вращение штоков 4 вокруг собственной оси. Это существенно упрощает конструкцию и снижает трение.
Максимальная сила взаимодействия магнитов штоков 1 и дополнительных магнитов штоков 2 с магнитами роторов 3 достигается, если магниты штоков 1 и дополнительные магниты штоков 2 проходят при работе преобразователя относительно ротора над серединой межполюсного промежутка магнитов ротора 3. Дополнительные магниты ротора 5 поддерживают высокий уровень магнитной силы взаимодействия при подходе к мертвым точкам. Для высокого уровня магнитной силы необходимо, чтобы дополнительный магнит штока 2 на ту же рабочую цилиндрическую поверхность был выведен противоположным магниту штока 1 полюсом. Тогда при чередующихся полярностях магнитов роторов 3 магниты штоков 1 и дополнительные магниты штоков 2 будут взаимодействовать сразу со всеми ближайшими магнитами роторов 3 и дополнительными магнитами роторов 5, увеличивая уровень магнитной силы взаимодействия.
Поскольку магниты штоков 1 и дополнительные магниты штоков 2 выведены полюсами сразу на две концентрические цилиндрические рабочие поверхности, каждый магнит штока 1 взаимодействует сразу с четырьмя магнитами ротора 3, и каждый дополнительный магнит штока 2 также взаимодействует одновременно с четырьмя магнитами ротора 3.
Для увеличения магнитной силы можно наращивать число рядов магнитов штоков 1, дополнительных магнитов штоков 2, магнитов роторов 3 и дополнительных магнитов роторов 5 как в осевом, так и в радиальном направлении. При этом сразу на две рабочие цилиндрические поверхности могут быть выведены как магниты штоков 1 и дополнительные магниты штоков 2, так и магниты роторов 3. При чередовании нескольких «слоев» магнитов штоков 1 и дополнительных магнитов штоков 2 с магнитами роторов 3 в радиальном направлении может быть реализована ситуация, когда часть магнитов роторов 3 и часть магнитов штоков 1 и дополнительных магнитов штоков 2 выведены сразу на две цилиндрические концентрические рабочие поверхности. При выборе конструкции необходимо руководствоваться требуемым диаметром и длиной преобразователя, а также простотой изготовления и легкостью штоков 4 с магнитами штоков 1 и дополнительными магнитами штоков 2.
Векторы намагничивания магнитов штоков 1 и дополнительных магнитов штоков 2, магнитов роторов 3 и дополнительных магнитов роторов 5 преимущественно должны быть направлены вдоль радиусов, т.е. направлены к оси или от оси вращения роторов в плоскости, перпендикулярной этой оси.
На Фиг.5 показан один из роторов 6 с магнитами ротора 3 и дополнительными магнитами ротора 5, имеющий возможность вращения относительно неподвижного корпуса 7. Внутренняя часть ротора 6 выполнена с возможностью сдвига вдоль оси вращения, посредством толкателя 8, соединенного с внутренней частью ротора 6 посредством опорного подшипника 9. На внутренней части ротора 6 количество рядов магнитов 3 в осевом направлении на один больше, чем на внешней части. Это необходимо для того, чтобы при сдвиге внутренней части ротора 6 вниз на расстояние высоты магнита ротора 3 и межполюсного промежутка в осевом направлении, магнитное поле от магнитов ротора 3 в области нахождения магнитов штоков 1 и 2 было близким к нулю.
На Фиг.6 крупно показан вырез внутренней части ротора 6 с магнитами ротора 3 и дополнительными магнитами ротора 5, магниты 3 внешней части ротора 6 и дополнительные магниты внешней части ротора 6. Для наглядности внешняя часть ротора 6 не показана, а часть штоков 4 с магнитами штоков 1 и дополнительными магнитами штоков 2 показаны. Буквами S и N обозначены полюса магнитов. Направление намагниченности чередуется в направлении оси вращения, вектор намагниченности в каждой точке магнитов параллелен радиусу в этой точке (радиальная намагниченность).
Для пуска преобразователя желательно придать ротору 4 начальное вращение в необходимом направлении, на тот случай, если штоки 3 находятся в мертвых точках и направление движения ротора 4 при начале их движения не определено.
На Фиг.7 показана часть двигателя с преобразователем: соединение наружных поршней 10 с тягами 11 и одним из штоков 4, а также соединение внутренних поршней 10 между собой соединителем поршней 12 и с другим штоком 4. Для наглядности цилиндрическая часть штоков 4 не показана. При работе двигателя тяги 11 должны быть изготовлены из материала, имеющего высокую прочность на растяжение, так как тяги 11 испытывают в основном нагрузки растяжения при поочередной работе цилиндров.
На Фиг.8 показана часть двигателя с преобразователем в продолжение Фиг.7, также показаны цилиндрические части штоков 4, двигающиеся по направляющей скольжения 13. Направляющая скольжения 13 при работе не испытывает существенных нагрузок от штоков 4 и может изготавливаться, например, из графита или фторопласта.
На Фиг.9 показана часть двигателя с преобразователем: видна связь одного штока 4 с тягами 11 и другого штока 4 с соединителем внутренних поршней 12. Для повышения частоты и мощности двигателя штоки 4, тяги 11, и соединитель внутренних поршней 12 должны быть максимально облегчены, и могут быть изготовлены, например, из углекомпозита.
На Фиг.10 показана часть двигателя с преобразователем: цилиндры 14 с впускными 15 и выпускными 16 продувочными окнами. Нижняя часть корпуса 7 и цилиндрические части штоков с направляющими не показаны. Стрелки указывают направления вращения роторов 6.
На Фиг.11 показан общий вид двигателя с преобразователем: показаны ограничители хода поршней 17, подшипники роторов 18, выпускные коллекторы 19 и впускной коллектор 20. Впускной коллектор 20 объединяет впускные окна 15, посредством патрубка внутри направляющей скольжения 13 (на Фиг. 11 не видны). Таким образом, поступление воздушно-топливной смеси можно осуществлять только с одной стороны двигателя. Это важно для двигателя в авиационном исполнении, представленном на Фиг.12: показан обтекатель 21 и лопасти 22 установленные непосредственно на роторах 6. Впускной и выпускной коллекторы не показаны. Закрепление к крылу или носовой части летательного аппарата производится к корпусу 7. Наличие противоположно-вращающихся лопастей может быть использовано в летательных аппаратах вертикального взлета, например, дронах, вертолетах, летающих автомобилях.
Двигатель в автомобильном исполнении показан на Фиг. 13: непосредственно на одном из роторов 6 установлен обод колеса 23.
Высокая эффективность работы всей магнитной системы достигается при минимальных воздушных зазорах. Все магнитные потоки, не проходящие через зазоры, должны быть по возможности замкнуты магнитопроводами. Замыкание потоков может происходить через штоки 4 и ротор 6, изготовленные из материалов с высокой магнитной проницаемостью.
Предложенный преобразователь может также работать в режиме преобразования вращательного движения в возвратно-поступательное движение, например, для привода насоса. Сущность работы при этом не меняется, передача энергии от вращающегося ротора 6 к движущемуся возвратно-поступательному штоку 4 происходит благодаря взаимодействию магнитов роторов 3, 5 и магнитов штоков 1, 2. Это используется также при запуске двигателя внешним двигателем (стартером) либо другим способом вращения ротора 6 внешней силой.
В режиме пуска роторы 6 раскручиваются внешней силой, поршни 10 сжимают воздух в цилиндрах 14, в которые подается топливовоздушная смесь. При самовоспламенении топливовоздушной смеси поршни 10 начинают двигаться в противоположных направлениях, двигая штоки 4 и вращая роторы 6 благодаря магнитному взаимодействию магнитов штоков 1 и магнитов роторов 3, а также дополнительных магнитов штоков 2 и дополнительных магнитов роторов 5 при их наличии.
Регулировка мощности двигателя производится регулировкой количества топливной смеси, подаваемой в цилиндры 14 через впускной коллектор 20. Можно также реализовать двигатель с непосредственным впрыском в цилиндры 14. Тогда через впускной коллектор 20 подается воздух, а топливо впрыскивается форсунками непосредственно в цилиндры 14.
Предотвращение ударов поршней 10 друг об друга происходит благодаря сопротивлению сжатого воздуха в цилиндрах 14. Поверхность поршней 10 при высоких степенях сжатия должна быть плоской.
Двигатель может быть выполнен на подшипниках 18 из керамики без смазки и с воздушным охлаждением. Это возможно благодаря тому, что вектор вращающего момента параллелен оси цилиндра 14, и поршень 10 не создает боковой нагрузки на стенку цилиндра 14, а также благодаря возможности использовать высокие степени сжатия, обеспечивающие высокий термический КПД и относительно низкую температуру выхлопных газов.
Генераторная установка с применением двигателя с предлагаемым преобразователем может содержать обмотки возбуждения на роторах 6 или постоянные магниты возбуждения, или использовать для возбуждения магниты ротора 3, выведенные полюсами на внешнюю или внутреннюю части роторов 6. При этом статор генераторной установки должен соответственно охватывать внешнюю часть роторов 6 или находиться внутри внутренней части роторов 6.
Наилучшим вариантом выполнения преобразователя возвратно-поступательного движения во вращательное движение, является Модификация, т.к. магнитная сила взаимодействия при тех же габаритах преобразователя выше. Наилучшим вариантом двигателя будет двигатель на основе этого варианта преобразователя, наилучшим вариантом генераторной установки – генераторная установка на основе этого варианта преобразователя, а наилучший вариант транспортного средства – на базе наилучшего варианта двигателя и/или генераторной установки.
Внутренние части двигателя с преобразователями по Модификации представлены на Фиг. 4-11.
Двигатель по Модификации был подвергнут численному расчету на компьютере по методике [7], показавшему, что при внешнем диаметре роторов 6, равном 150 мм, ходе штока 4, равном 30 мм, и диаметре поршней 41.5 мм, максимальная мощность составит 12 л.с. при частоте колебаний поршней около 8400 в минуту. Длина двигателя при этом составила около 500 мм. Такие габариты и мощность подходят для небольшого транспортного средства или генераторной установки. Мощность при необходимости может быть изменена путем изменения размеров магнитов и/или количества магнитов в радиальном или осевом направлении с одновременным изменением диаметра цилиндров. Наращивание количества магнитов штоков 1 и магнитов роторов 3 в радиальном направлении сопровождается соответствующим увеличением количества цилиндрических концентрических рабочих поверхностей.
Библиографический список
- Сухаревский В.В. Двухтактный двигатель внутреннего сгорания с магнитным преобразованием движения // Современные научные исследования и инновации. 2016. № 11 [Электронный ресурс]. URL: http://web.snauka.ru/issues/2016/11/74548 (дата обращения: 08.06.2018).
- Международная патентная заявка PCT. Sukharevskiy Vladimir Vladimirovich. TWO-STROKE INTERNAL COMBUSTION ENGINE HAVING MAGNETIC MOTION CONVERSING. WO2018088925 (A1) опубликована 17.05.2018 с датой приоритета 14.11.2016.
- Сухаревский В.В. Преобразователь возвратно-поступательного движения во вращательное и двухцилиндровый двигатель на его основе // Современные научные исследования и инновации. 2014. № 10. Ч. 1 [Электронный ресурс]. URL: http://web.snauka.ru/issues/2014/10/39944 (дата обращения: 08.06.2018).
- Международная патентная заявка PCT. Sukharevskiy Vladimir Vladimirovich. CONVERTER, TWO-CYLINDER ENGINE AND VEHICLE. WO2016068744 (A1) опубликована 06.05.2016 с датой приоритета 29.10.2014.
- Сухаревский В.В. Модель преобразователя возвратно-поступательного движения во вращательное // Современные научные исследования и инновации. 2014. № 7 [Электронный ресурс]. URL: http://web.snauka.ru/issues/2014/07/36455 (дата обращения: 07.06.2018).
- Международная патентная заявка PCT. Sukharevskiy Vladimir Vladimirovich. CONVERTER FOR CONVERTING RECIPROCATION MOTION TO ROTATIONAL MOTION, MOTOR AND VEHICLE. WO2016003305 (A1) опубликована 07.01.2016 с датой приоритета 30.06.2014.
- Сухаревский В.В. Кинематика и динамика двигателя внутреннего сгорания с магнитным преобразователем возвратно-поступательного движения во вращательное // Современные научные исследования и инновации. 2016. № 2 [Электронный ресурс]. URL: http://web.snauka.ru/issues/2016/02/64331 (дата обращения: 07.06.2018).
Количество просмотров публикации: Please wait