

В весенний период огромное количество дачников занимаются тем, что начинают выращивание рассады в домашних условиях. Но при большом количестве растений не всегда есть возможность своевременного полива рассады. В связи с этим было предложено организовать автоматический полив растений в домашних условиях. Автоматическая система полива проста в использовании. Участие человека в поливе рассады практически не требуется.
В качестве управляющего компонента выбран микроконтроллер Atmel AVR ATMEGA328P. Программирование микроконтроллера ведется полностью через IDE (собственную программную оболочку) Arduino. Стандартным языком программирования для Arduino является язык высокого уровня С++.
Микроклиматический параметр считывается при помощи датчика влажности почвы, который обрабатывается микроконтроллером. В результате сигнал управления поступает на устройство, отвечающее за микроклимат (система полива).


Рисунок 1. Структурная схема управления автоматическим поливом рассады
Для сборки макетного образца и отладки программного обеспечения устройства в качестве датчика будет выступать модуль, специально разработанный для платформы Arduino (рис. 2).
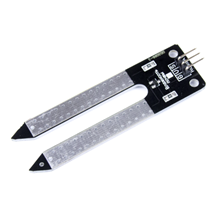
Рисунок 2. Датчик влажности почвы
Сигнал с датчика влажности почвы подается на аналоговый вход микроконтроллера ATMEGA328P и преобразуются 10-разрядным АЦП. В зависимости от величины этого кода можно судить об уровне влажности почвы (чем больше значение, тем выше влажность).
Устройство оснащено погружной помпой, длинными эластичными трубками, капельницами. Помпа помещается в емкость с водой объемом в несколько литров. Полив растений осуществляется автоматически в зависимости от показаний влажности почвы. В случае, когда вода в емкости будет подходить к концу, устройство подаст сигнал человеку.

Рисунок 3. Погружная помпа
Для задания степени влажности в устройстве предусмотрен символьный дисплей (рис.4).

Рисунок 4. Символьный дисплей
Автоматический полив необходим для благоприятного роста растений. Благодаря такому устройству рассада всегда будет получать недостающее количество влаги.
Библиографический список
-
R. Porter, S. Schmidiger, J.E. Roy How a H-bridge Works / URL http://www.eeadventures.com/motordriver/the-blackbox-h-bridge/the-h-bridge/
-
Осипов, Д.М. Модернизация нагрузки-характериографа / Д.М. Осипов, К.О. Киселёв // Информационные технологии, энергетика и экономика (микроэлектроника и оптотехника, информационные технологии в управлении и производстве). — 2015. — С. 170–173.
-
Юревич Е. И. Основы робототехники: Учебник для вузов. – Л.: Машиностроение, 2004. – 271 с.
Количество просмотров публикации: Please wait