

Самонастройка – это свойство системы к самоизменению в соответствии с изменением окружающих условий или изменением параметров системы и ее внутренних связей. В данной теме рассматриваются наблюдающие устройства, имеющие самонастройку в отношении приложенных к объекту управления внешних воздействий, не доступных прямому измерению, и наблюдающие устройства с адаптацией к неизвестным параметрам объекта управления. Эти наблюдающие устройства, помимо оценки переменных состояния объекта, идентифицируют неизвестные факторы, то есть неподдающиеся прямому измерению внешние воздействия и параметры системы, значения которых вначале были неизвестны.
1.Наблюдающие устройства с адаптацией к внешним воздействиям
Пусть объект описывается уравнением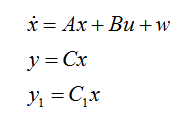 Где х-n- вектор состояния; у – скалярный выходной сигнал; у1 – n- вектор другой системы выходных сигналов; u-m-вектор управления; w-n-вектор внешних воздействий, не поддающихся непосредственному измерению; A,B,C,C1 –матрица с размерами nXn, nXm, 1Xn, nXn. Предлагаемое наблюдающее устройство описывается уравнением
Где х-n- вектор состояния; у – скалярный выходной сигнал; у1 – n- вектор другой системы выходных сигналов; u-m-вектор управления; w-n-вектор внешних воздействий, не поддающихся непосредственному измерению; A,B,C,C1 –матрица с размерами nXn, nXm, 1Xn, nXn. Предлагаемое наблюдающее устройство описывается уравнением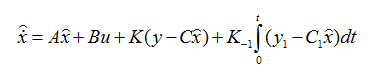 Где К- матрица столбец nX1, a K-1- (nXn)- матрица, отличающаяся от С1 лишь тем, что в главной диагонали вместо единиц фигурируют коэффициенты К2. Это уравнение отличается от известного уравнения наблюдающего устройства идентификации интегральным членом.
Где К- матрица столбец nX1, a K-1- (nXn)- матрица, отличающаяся от С1 лишь тем, что в главной диагонали вместо единиц фигурируют коэффициенты К2. Это уравнение отличается от известного уравнения наблюдающего устройства идентификации интегральным членом.
В равновесном состоянии уравнение имеет вид 
Интегральные члены как бы восстанавливают в уравнениях наблюдающего устройства постоянные внешние воздействия wi , что обеспечивает в установившемся состоянии полное совпадение этих уравнений с уравнениями объекта.
Однако астатическому наблюдающему устройству идентификации свойственен недостаток, заключающийся в необходимости измерения переменных состояния, производные которых фигурируют в уравнениях объекта, содержащих внешнее возмущение w1. Эти переменные состояния не всегда доступны прямому измерению. Указанный недостаток можно устранить, если на объект действует только одно неизвестное внешнее возмущение w. Когда на объект действует одно постоянное возмущение w, не поддающееся прямому измерению, возмущение можно оценить астатическим наблюдающим устройством идентификации
2.Наблюдающиее устройство с адаптацией к параметрам объекта
2.1Каноническая форма объекта
Объект можно характеризовать следующим уравнением относительно переменных состояния 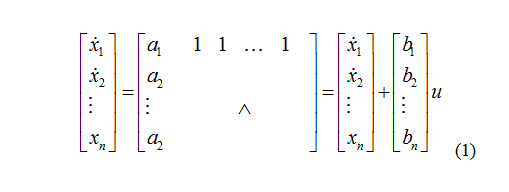 Где u, y –входной и выходной сигналы объекта,
Где u, y –входной и выходной сигналы объекта, -диагональная (n-1)X(n-1)- матрица, элементами которой служат – λ1 (i=2,…,n).
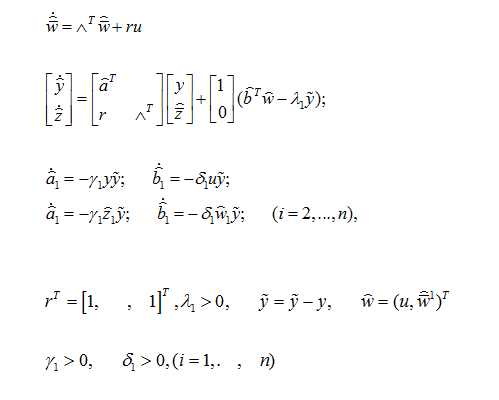 -коэффициенты усиления цепей адаптации, предназначены для настройки параметров
-коэффициенты усиления цепей адаптации, предназначены для настройки параметров ![]() . Выбором этих коэффициентов можно оптимизировать скорость идентификации.
. Выбором этих коэффициентов можно оптимизировать скорость идентификации.
Библиографический список
- Кожевников А.В. Применение метода модального управления для повышения стабильности работы электромеханических систем прокатного производства // Производство проката.-№11. -2013. С. 35-40.
- Булындин М.Г. Исследование эталонных систем модального управления // Современные научные исследования и инновации. 2013. №11 (31). С. 9.
- Кузовков, Н.Т. Модальное управление и наблюдающие устройства – Москва, «Машиностроение», 1976, 184 с.
- Методы классической и современной теории автоматического управления. Учебник в 3-х томах / Под ред. Н.Д. Егупова. — М.: Изд-во МГТУ им. Баумана, 2000.
- Мирошник, И.В. Теория автоматического управления. Линейные системы (Серия: «Учебное пособие»). – СПб.: Питер, 2005. — 336 с.
- Попов, Е.П., Бесекерский, В.А.,. Теория систем автоматического управления / Е.П. Попов, В.А. Бесекерский. – Изд. 4-е, перераб. и доп. – Спб.: Изд-во «Профессия», 2003. – 752 с.
- http://habrahabr.ru/post/128704/
- http://www.conf-ulstu.ru/nam_12.php
Количество просмотров публикации: Please wait