

1. Использование компьютера для измерения частоты
Иногда в учебных экспериментах возникает необходимость периодического (через 1 – 30 с) измерения частоты сигнала. Эта задача может быть успешно решена с помощью ПЭВМ [1 – 5]. Для этого электрические колебания с помощью формирователя импульсов преобразуют в цифровой сигнал, и получившуюся последовательность лог. 0 и лог. 1 заводят в компьютер, например, через LPT–порт (25 вывод – общий, один из выводов 10 – 17 – для ввода сигнала). При использовании ПЭВМ типа Celeron с операционной системой Windows 98 частота поступающих импульсов может быть определена с помощью программы ПР–1, написанной на языке QBasic. На ее основе может быть написана аналогичную программу на языке Pascal или Delphi. В литературе [1, 2, 5] описаны и другие способы сопряжения внешнего устройства с компьютером через последовательный порт или USB–порт и рассмотрены соответствующие программы, обрабатывающие поступающие сигналы. В результате этого ПЭВМ превращается в цифровой частотомер, который позволяет выполнить различные учебные опыты [3; 4, с. 92–116].
Опыт 1.1. Измерение скорости вращения. Чтобы определить скорость вращения вала двигателя, на нем закрепляют диск с прорезями, а рядом устанавливают оптодатчик (светодиод, фотодиод и схема сопряжения), подключенный к ПЭВМ. При вращении диска прорези должны пересекать световой пучок так, чтобы фотодиод периодически освещался и затемнялся. Компьютер определяет частоту импульсов, поступающих с выхода оптодатчика, которая пропорциональна скорости вращения диска.
Опыт 1.2. Частотная модуляция. Порт компьютера соединяют с RC–генератором прямоугольных импульсов, частота которого может изменяться при замыкании и размыкании тумблера. Другой вариант опыта предусматривает использование генератора звуковой частоты, к выходу которого подключен формирователь прямоугольных импульсов. Программу следует отредактировать так, чтобы на экран выводилась последовательность 0 и 1, где 0 соответствует низкой частоте входного сигнала, а 1 – более высокой частоте.
Опыт 1.3. Изучение датчика координаты. К компьютеру подключают RC–генератор, вырабатывающий последовательность прямоугольных импульсов, частота которых зависит от сопротивления резистивного датчика координаты. Запускают программу. Поворачивая подвижный контакт резистора, наблюдают получающийся график зависимости координаты от времени. Можно изменить программу так, чтобы она через заданное время выводила координату движка резистора в числовом виде.
Опыт 1.4. Подключение термодатчика. Если вместо датчика координаты к генератору импульсов подключить терморезистор (например, типа ММТ–12), то при его нагревании частота импульсов будет увеличиваться. Представленная выше программа позволяет получить график зависимости температуры терморезистора от времени.
2. Изучение передачи ЧМ сигнала по каналу связи
Используя рассмотренный выше частотомер на основе ПЭВМ, можно экспериментально изучить передачу информации по каналу связи с помощью частотно–модулированного сигнала.
Опыт 2.1. Передача информации по проводной линии связи. Два одинаковых компьютера соединяют двумя проводниками, на принимающем запускают программу, декодирующую сообщение, на передающем компьютере – программу, кодирующую сообщение. Общий провод соединяет 25 вывод LPT–порта ПЭВМ 1 с 25 выводом LPT– порта ПЭВМ 2. Сигнальный провод соединяет 3 вывод LPT– порта ПЭВМ 1 с 11 выводом LPT– порта ПЭВМ 2 (рис. 1.1).

При запуске программы–кодера на ПЭВМ 1, она запрашивает передаваемое сообщение (строка символов 0 и 1), затем последовательно перебирает символ за символом, осуществляя частотно–импульсное кодирование, так что на соответствующем выводе LPT–порта появляются импульсы напряжения изменяющейся частоты. Допустим, символу “1″ соответствуют импульсы частотой , символу “0″ – импульсы частотой , а если сообщение не передается, то на выходе – логический 0. Программу–декодер на ПЭВМ 2 запускают раньше начала сеанса связи, она должна осуществлять декодирование поступающих сигналов. После окончания передачи сообщения программа–декодер должна перейти в режим ожидания до начала следующего сеанса связи.
Опыт 2.2. Передача информации по оптическому каналу связи. Для осуществления передачи сообщений с помощью оптической связи к LPT–порту передающей ПЭВМ 1 через схему сопряжения 2 подключают полупроводниковый лазер–указку 3. Его луч должен попадать на фотодиод 4, соединенный через формирователь сигнала 5 с LPT–портом принимающей ПЭВМ 6 (рис. 1.2). Сначала запускают программу–декодер, принимающая ПЭВМ 2 находится в режиме ожидания. Затем запускают программу–кодер на ПЭВМ 1 и с помощью клавиатуры набирают сообщение в виде последовательности 0 и 1. ПЭВМ 1 осуществляет кодирование, и вырабатывает последовательность импульсов изменяющейся частоты. Лазер выдает световые вспышки, периодически освещая фотодиод. ПЭВМ 2 декодирует сообщение и выводит его на экран. Можно предусмотреть передачу сообщений на русском языке, для этого программа–кодер сначала должна закодировать каждую из 32 букв пятью битами 0 или 1, а уже потом получившуюся последовательность 0 и 1 использовать для частотно–импульсной модуляции свечения лазера.
3. Изучение электрических машин с помощью цифрового тахометра
Изучение электрических машин требует снятия их скоростных характеристик, что требует одновременного измерения токов, напряжений и т.д., а также определения частоты вращения ротора. Экспериментальная установка (рис. 2.1) для изучения электрических машин состоит из асинхронного двигателя 1, вал которого соединен с валом машины постоянного тока 3. На валу установлен диск 2 с прорезями по краю, вблизи него – оптодатчик 4, соединенный через параллельный LPT–порт с персональной ЭВМ. Трехфазный асинхронный двигатель типа ЭАО – 31П подключен к регулируемому источнику переменного напряжения (ЛАТРу) или постоянного напряжения и используется в качестве двигателя или индукционного тормоза. Машина постоянного тока (двигатель от пылесоса) может иметь независимое, параллельное или последовательное возбуждение. Она в различных опытах используется в качестве двигателя, генератора или индукционного тормоза. Оптодатчик состоит из светодиода и фотодиода, расположенных напротив друг друга; между ними находится диск с прорезями. На ПЭВМ запускают программу на языка Pascal, которая определяет время одного оборота вала и вычисляет скорость его вращения.
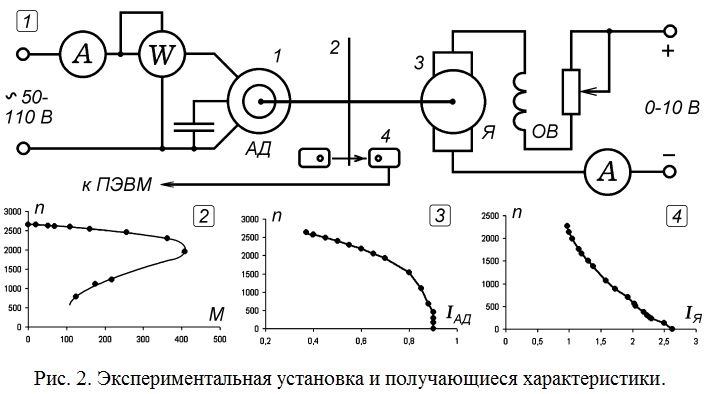
Опыт 3.1. Изучение зависимости частоты ротора АД от механического момента на валу. АД подключают к ЛАТРУ, а МПТ используют в качестве генератора с независимым возбуждением. Через обмотку возбуждения МПТ пропускают постоянный ток 0,5 – 1 А, к якорю в качестве нагрузки подключают реостат и амперметр с вольтметром. МПТ работает в режиме индукционного тормоза, создаваемый ею тормозящий момент пропорционален току якоря и частоте вращения ротора, который измеряют с помощью ПЭВМ. При постоянной скорости ротора вращающий момент равен тормозящему. На АД подают 90 В и, изменяя сопротивление нагрузки в цепи якоря МПТ, снимают зависимость частоты вращения ротора АД от механического момента на валу (рис. 2.2).
Опыт 3.2. Изучение зависимости частоты вращения ротора АД от потребляемого тока. Проводят аналогичный эксперимент, плавно увеличивая механическую нагрузку на валу путем уменьшения сопротивления цепи якоря МПТ, одновременно измеряя частоту вращения ротора. Снимают зависимость n = f(I_ад). При этом уменьшение частоты вращения ротора АД сопровождается ростом потребляемого тока (рис. 2.3).
Опыт 3.3. Изучение зависимости частоты вращения ротора МПТ в режиме генератора от тока якоря при последовательном возбуждении. Якорь и обмотку возбуждения МПТ соединяют последовательно с реостатом и амперметром и подключают к источнику постоянного напряжения (рис 2.1). Обмотку АД подключают к регулируемому источнику постоянного тока, АД работает в режиме индукционного тормоза. Включают МПТ (в качестве двигателя), пропуская через него ток 1 А. Регулируя напряжение питания АД, плавно увеличивают тормозящий момент, действующий на вал со стороны АД. Снимают зависимость n = f(I_я). При уменьшении частоты вращения ротора МПТ ток возрастает (рис. 2.4).
Опыт 3.4. Изучение зависимости частоты вращения ротора АД нагруженного на МПТ в качестве генератора с независимым возбуждением и постоянной нагрузкой, от напряжения питания АД. Через обмотку возбуждения МПТ пропускают ток возбуждения, к обмотке якоря подключают нагрузку 10 ом. Плавно увеличивая напряжение питания АД, измеряют частоту вращения ротора. Снимают зависимость n = f(U_ад).
Опыт 3.5. Изучение зависимости частоты вращения ротора МПТ в режиме двигателя (последовательное возбуждение) от напряжения питания. Обмотку возбуждения МПТ соединяют последовательно с якорем и через реостат подключают к источнику постоянного напряжения. Изменяя напряжение питания, контролируемое вольтметром, с помощью оптодатчика, подключенного к ПЭВМ, определяют частоту вращения ротора, и снимают соответствующую характеристику n = f(U_мпт).
Опыт 3.6. Изучение зависимости частоты вращения ротора МПТ в режиме двигателя от тока возбуждения. Подключают МПТ к источнику постоянного напряжения, используя параллельную схему возбуждения. Последовательно обмотке возбуждения и якорю МПТ включают реостаты с амперметрами, обе ветви подсоединяют к выпрямителю. Подают напряжение и, изменяя реостатом ток возбуждения, измеряют с помощью ПЭВМ частоту вращения ротора при различных токах возбуждения. Снимают зависимость n = f(I_в).
Опыт 3.7. Изучение зависимости частоты вращения ротора от времени при переходном электро–механическом процессе. Включают двигатель (АД или МПТ) и ждут, пока его скорость не достигнет постоянного значения. Запускают программу, вычисляющую скорость ротора и строящую график ее зависимости от времени. Резко изменяют напряжение питание двигателя (или индукционного тормоза), на экране получается график зависимости скорости от времени. Система переходит из одного установившегося состояния динамического равновесия в другое. Скорость вращения ротора, плавно изменяясь, постепенно приближается к новому предельному значению.
Использование рассмотренных выше экспериментов в учебном процессе способствуют повышению интереса студентов к физике и информационным технологиям, более глубокому усвоению изучаемых вопросов.
Библиографический список
- Ан П. Сопряжение ПК с внешними устройствами. – М.: ДМК Пресс, 2001. – 320 с.
- Магда Ю.С. Компьютер в домашней лаборатории. – М.: ДМК Пресс, 2008. – 200 с.
- Майер Р.В. Информационные технологии и физическое образование. – Глазов: ГГПИ, 2006. – 64 c. (http://maier-rv.glazov.net)
- Майер Р.В. Как стать компьютерным гением или книга о информационных системах и технологиях. – Глазов: ГГПИ, 2008. – 2004 c.
- Матаев Г.Г. Компьютерная лаборатория в вузе и школе: Учебное пособие. – М.: Горячая линия–Телеком, 2004. – 440 с.
Количество просмотров публикации: Please wait