

Снижение динамических нагрузок на энергетическую установку привода машины, исключения холостой работы и энергосбережение в технологическом цикле являются одними из актуальных задач совершенствования приводов машин.
Для решения упомянутых задач используются различные методы. Рассмотрим два, на наш взгляд наиболее рациональные:
- Введение упругодемпфирующих связей в кинематические звенья, непосредственно связанные с валом энергетической установки;
- Повышение плавности включения исполнительного привода, наряду с исключением действия паразитных сил при холостой работе машины.
Наличие упругодемпфирующих связей в приводе гидрофицированной машины позволяет снизить динамические нагрузки на энергетическую установку, при этом наличие упругодемпфирующей связи в механической части незначительно сказывается на жесткость самого привода.
Теоретические и экспериментальные исследования эластичного привода гидронасоса (ЭПГ) исполнительного рычажного механизма (наиболее распространённого исполнительного гидропривода сельскохозяйственных машин) показывают снижение динамичности в 1,2 – 1,4 раза.
Рассмотренный способ снижения динамической нагруженности привода с использованием ЭПГ показал эффективность для приводов циклического действия, с использованием звеньев возвратно-поступательного движения, на рис.1 представлены сравнительные диаграммы мгновенной потребляемой мощности при различных жесткостях привода вала насоса. Как видно из диаграмм, при неустановившихся режимах работы мгновенная потребляемая мощность энергетической установки, а следовательно и среднее значение затрачиваемой на привод энергии меньше [1].
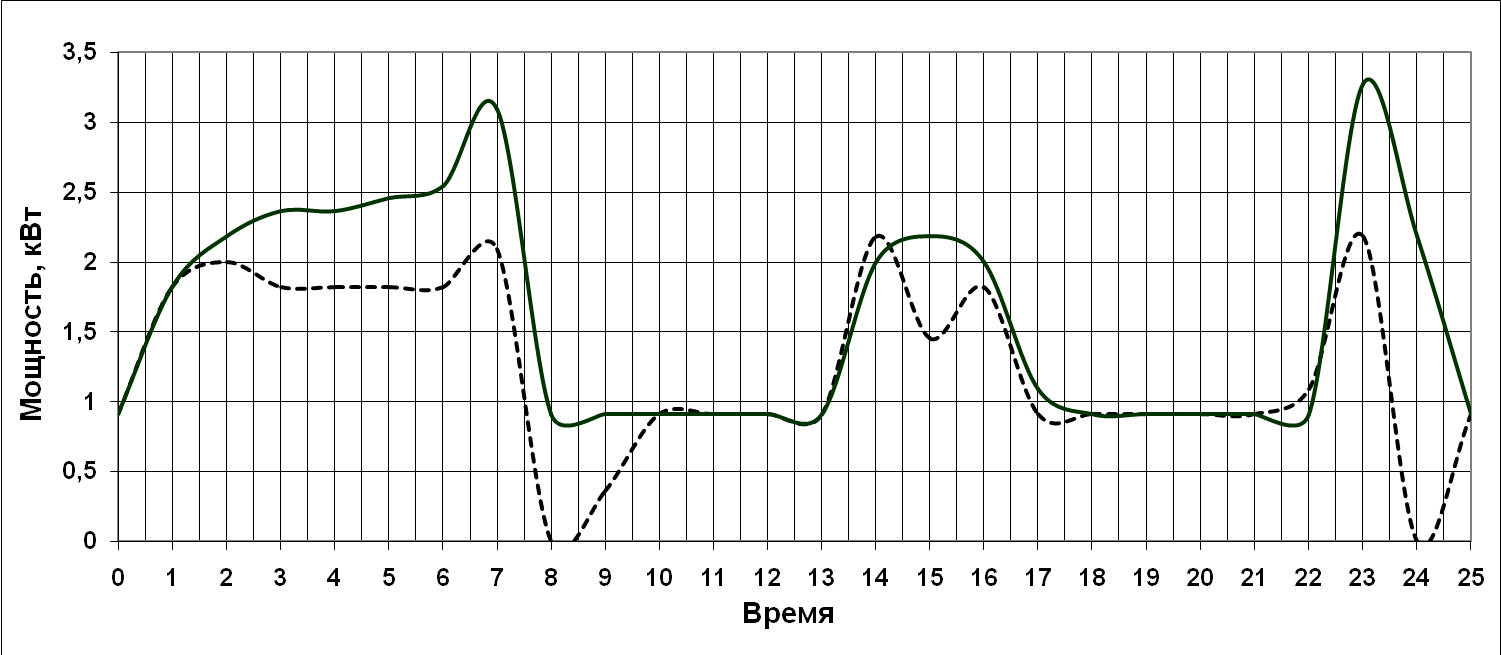
Рисунок.1. – Диаграмма потребляемой мгновенной мощности за цикл операции.
___ обычный привод гидронасоса;
- – - эластичный привод гидронасоса (жесткость муфты 55 Н∙м/рад).
Повышение экономичности реверсивных гидроприводов вращательного действия наряду с улучшением динамических характеристик возможно при рациональном выборе кинематических параметров привода.
С целью повышения плавности включения реверсивного насоса-мотора и исключения затрат энергии на привод насоса в холостом режиме предлагается гидромеханический привод плавного включения, который позволяет отключать привод гидронасоса в момент холостого хода на протяжении всего технологического цикла, а на ряду с плавностью включения гидронасоса позволяет в конечном счёте экономить затраты энергии.
Работа привода (рис.2) осуществляется следующим образом. В нейтральном положении энергетическая установка 1 работает в холостом режиме, затрачивая энергию только на трение в подшипниках планетарного редуктора, при. этом вращение от двигателя 1 через муфту 2 передается на солнечную шестерню 3 и через сателлит 4 на коронное колесо 5 и далее на зубчатое колесо (ЗК) 6 и барабан 7, одновременно вращается водило 8 с ЗК 9 и барабаном 10, причем вращение коронного колеса 5 и водила 8, а соответственно и ЗК 6 и ЗК 9 происходит в противоположных направлениях. Реверсивность привода осуществляется за счет зацепления ЗК 6 и 13 или 9 и 14. Колеса 13 и 14 размещены на одной каретке 12, затормаживание барабанов 7 или 10 дифференциальной передачи осуществляется фрикционным диском 15, посаженным на ступицу 16 и управляемым рычагами 17 и 18. Рычаг 18 может фиксироваться зацепами 19. Каретка 12 в свою очередь посредством шлицевого соединения передает вращение валу 11 насоса 20. В положении, изображенном на рис.2 вал насоса стоит на месте – холостой режим.
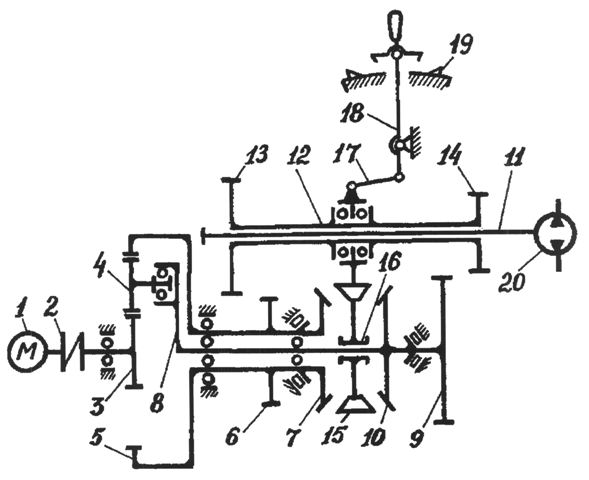
Рисунок 2 – Схема реверсивного механизма плавного включения насоса
Так как привод является реверсивным, то передача вращения может осуществляться по двум вариантам:
1) От солнечной шестерни 1 к зубчатому колесу 5 при остановленном водиле Н, т.е.
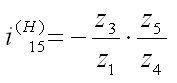 (1)
(1)
2) От солнечной шестерни 1 к зубчатому колесу 7 при остановленном коронном колесе 3, т.е.
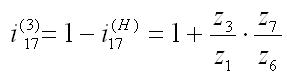 (2)
(2)
Учитывая, что при любом направлении вращения выходного вала привода частота вращения вала насоса должна быть одинаковой по модулю ![]() , то приравняв левые части выражений (1) и (2), получим:
, то приравняв левые части выражений (1) и (2), получим:
или (3) 
По данной схеме планетарного механизма колеса 2 и 3 образуют внутреннее зацепление, а значит всегда z3>z1, и соответственно
 (4)
(4)
Для обеспечения реверсивности привода данной схемы необходимо чтобы i45<0 и i67<0, а для выполнения условия соосности колес 5 и 7 должно выполняться условие:
z4+z5 = z6+z7 (5)
Задавшись передаточным отношением планетарной передачи и совместно решая выражения (3) и (5) при соблюдении условия (4), можно определить число зубьев конечной передачи z4+z5 или z6+z7. На первый взгляд эта задача кажется элементарной, но даже ограничив минимальное количество зубьев колес до 17 и задав предел максимального числа зубьев колес 300 было получено 473 варианта при расчетах на ЭВМ в специально составленной программе. При этом удовлетворяло требуемому диапазону передаточных отношений привода i=1…10 всего 91 результат, на каждое полученное значение передаточного отношения приходится в среднем по 13 вариантов различных сочетаний чисел зубьев колес привода.
Общий к.п.д. механического привода:
а) при передаче вращения через коронное колесо
![]() (6)
(6)
б) при передаче вращения через водило
 (7)
(7)
где,  - к.п.д. муфты;
- к.п.д. муфты;
 - к.п.д. пары подшипников качения;
- к.п.д. пары подшипников качения;
 - к.п.д. зубчатого зацепления;
- к.п.д. зубчатого зацепления;
n – число пар подшипников качения;
k – число зубчатых зацеплений в цепи передачи вращения.
Как видно из выражений (6) и (7) различия в к.п.д. механической части привода при различных направлениях передачи вращения (для осуществления реверсивности привода) отличаются ненамного, и составляет 0,01…0,008.
Из уравнения энергетического баланса работа, затрачиваемая на привод конечного исполнительного звена Адв в общем виде:
![]() (8)
(8)
где Апс – работа сил полезного сопротивления;
Асопр – работа сил трения и других паразитных сопротивлений;
Аин – работа сил инерции.
С другой стороны, Асопр=Атр+Апн , где Атр – работа, затрачиваемая на трение в кинематических парах, Апн – работа, затрачиваемая при холостой работе гидропривода на привод насоса и дросселирование рабочей жидкости через местные сопротивления магистралей и гидроагрегатов, например, редукционных клапанов.
Так как предлагаемая схема привода гидронасоса исключает привод вала насоса в момент простоя исполнительного гидропривода, то суммарная работа Адв во время простоя исполнительного гидропривода будет меньше на ΔА=Апн.
Все выше изложенное позволяет сделать вывод, что привод плавного включения гидравлического насоса в гидрофицированных машинах позволит снизить затраты энергии, в частности, потребляемой мощности (рис.3).

Рис.3 Сравнительная диаграмма мгновенной потребляемой мощности энергетической установкой при различных вида привода вала гидронасоса.
Литература
1. Несмиянов И.А., Хавронин В.П. Эластичный привод гидронасоса как способ снижения энергопотребления гидромашин./ Тракторы и сельскохозяйственные машины. 2007. №6. С.45-46.
Количество просмотров публикации: Please wait