

Введение. Задача создания высокоточных и миниатюрных исполнительных устройств линейных микроперемещений в настоящее время имеет большое практическое значение. В полной мере она может быть решена при использовании современных пьезоэлектрических исполнительных устройств, построенных на основемногослойных пьезоактюаторов. По сравнению с пакетными устройствами предыдущего поколения они имеют меньшие габариты и обеспечивают большие значения перемещений при на порядок пониженном напряжении управления. Применение данных актюаторов, в качестве активных элементов пьезоэлектрических приводов, позволяет решать многие задачи в различных областях науки и техники. Колебательный характер переходных процессов имеет место улюбых пьезоэлектрических исполнительных устройств и многослойные актюаторы не являются исключением. При построении прецизионных систем позиционирования наличие таких колебаний затягивает переходные процессы и снижает точностные характеристики.
1. Статья подготовлена при финансовой поддержке РФФИ (Грант 08-09-00857-а)
2. Статья подготовлена при финансовой поддержке Конкурса грантов для студентов, аспирантов вузов и академических институтов, расположенных на территории Санкт-Петербурга
В данной работе рассматривается алгоритм управления пьезодвигателем, обеспечивающий апериодический характер переходного процесса и полную компенсацию колебаний.
На рисунке 1 представлена схема моделирования пьезодвигателя, который представляет собой пьезокерамический стержень со следующими параметрами:
Таблица 1 – Параметры пьезодвигателя
|
Длина |
|
| Площадь поперечного сечения | |
| Коэффициент усиления | |
| Внутреннее сопротивление | |
| Емкость пьезоэлемента | |
| Пьезомодуль | |
| Модуль Юнга | |
| Коэффициент упругости | |
| Коэффициенты прямогои обратного пьезоэффекта | |
| Масса пьезоэлемента | |
| Масса стола | |
| Суммарная масса |
На рисунке 2 – переходной процесс. При подаче постоянного напряжения равного 10В на вход системы, перемещение на выходе составит 0.7 мкм. Переходный процесс – апериодический с наложеннымина него затухающими колебаниямис максимальной амплитудой составляющей 8% от установившегося значения.
Упрощенная модель пьезодвигателя. Если пренебречь внутренней обратной связью по скорости ( ![]() ), влиянием жесткости конструкции, так как ее влияние мало по сравнению с упругостью(
), влиянием жесткости конструкции, так как ее влияние мало по сравнению с упругостью( ![]() ) Тогда можно представить модель пьезопривода в виде 2 звеньев – колебательного и апериодического, последнее соответствует высоковольтному усилителю на входе, модель представлена на рисунке 3.
) Тогда можно представить модель пьезопривода в виде 2 звеньев – колебательного и апериодического, последнее соответствует высоковольтному усилителю на входе, модель представлена на рисунке 3.
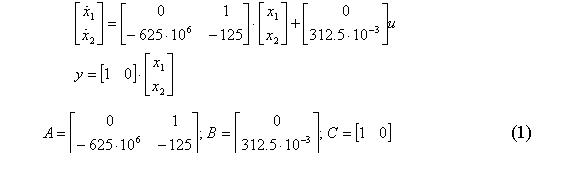
Для синтеза алгоритма управления перейдем к описанию привода с учетом его характеристик в пространстве состояний:
Проверим пару А,С на полную наблюдаемость

Определитель ![]() не равен нулю, то есть система полностью наблюдаема. Ее переходной процесс на рисунке 4.
не равен нулю, то есть система полностью наблюдаема. Ее переходной процесс на рисунке 4.
Разработка алгоритма управления.
Допустим мы хотим нулевое перерегулирование и время переходного процесса менее 1секунды.
Расчет: нулевое перерегулирование системе 2 порядка может обеспечить только полином Ньютона :
![]() (3)
(3)
Время переходного процесса связано с корнями![]() соотношением :
соотношением : ![]() ;или чтотоже самое
;или чтотоже самое
![]() ; (4)
; (4)
Для проектируемой системы выберем![]() , тогда ХП примет вид :
, тогда ХП примет вид : ![]()
Построим эталонную модель ![]()
где![]()
соответственно векторы состояния и выхода ![]() ,
,
![]() соответственно матрицы состояния и выхода.
соответственно матрицы состояния и выхода.
Алгебраическим спектром собственных значений
![]() матрицы
матрицы![]()
является ![]() =
=![]() =–48, сообщение которого матрице состояния
=–48, сообщение которого матрице состояния
проектируемой системы может доставить последней желаемые динамические свойства
в переходном и установившемся режимах. Совпадающие собственные значения матриц Ги ![]() отсутствуют, то есть выполняется условие
отсутствуют, то есть выполняется условие
![]() ;
;
Матрица![]() примет вид :
примет вид :
![]() =
=![]() (5)
(5)
Выберем матрицу![]() из условия полной наблюдаемости матриц
из условия полной наблюдаемости матриц ![]()
![]() =
=![]() (6)
(6)
Матрица![]() векторного преобразования подобия удовлетворяет матричному уравнению Сильвестра :
векторного преобразования подобия удовлетворяет матричному уравнению Сильвестра :
![]() (7)
(7)
![]() =
=![]() (8)
(8)
![]() =
= ![]() (9)
(9)
Вычислим матрицу![]() прямой связи по экзогенному задающему воздействию
прямой связи по экзогенному задающему воздействию ![]() из условия равенства выхода входу
из условия равенства выхода входу![]() в неподвижном положении
в неподвижном положении ![]() , таким образом
, таким образом ![]() имеет представление:
имеет представление:
![]() =1000 (10)
=1000 (10)
На рисунке 5 – схема управления с Kxи Kgрегулятором. На рисунке 6 – переходной процесс.
Вывод: таким образом, в результате моделирования установлено, что разработанный регулятор для управления пьезоэлектрическим исполнительным устройством на базе многослойной тонкопленочной пьезокерамики, обеспечивает полную компенсацию колебаний в переходном процессе, при его апериодическом характере и заданном времени переходного процесса. Использование такого алгоритма управления пьезоэлектрическим исполнительным устройством в системах позиционирования позволит повысить их точностные характеристики.
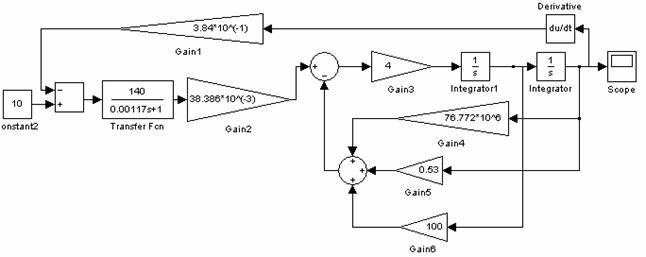
Рис. 1 – Математическая модель пьезодвигателя
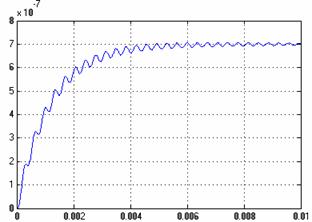
Рис. 2 – График переходного процесса для модели, представленной на рисунке 1
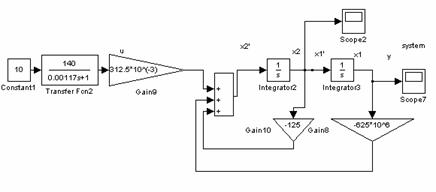
Рис. 3 –Упрощенная математическая модель пьезодвигателя в пространстве состояний
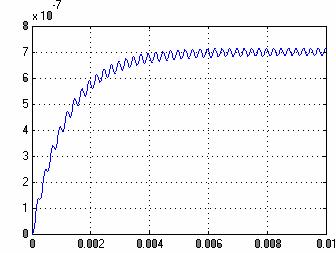
Рис. 4– График переходного процесса для модели, представленой на рисунке 3
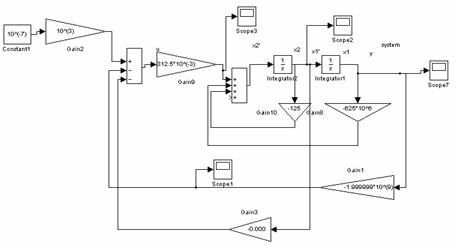
Рис. 5– Схема управления пьезоприводом с Кх и Кg регулятором
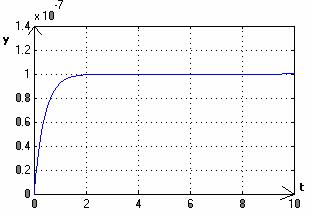
Рисунок 6– Переходной процесс в системе, представленной на рисунке 5
Библиографический список
- Бобцов А.А., Бойков В.И., Быстров С.В., Григорьев В.В., Коровьяков А.Н. Комплекс для исследования адаптивного управления пьезоприводом. – Сб. Материалы 1-й Российской мультиконференции по проблемам управления. Мехатроника, автоматизация, управление.- 2006, с.308-313.
- Бобцов А.А., Бойков В.И., Быстров С.В.,Григорьев В.В. Разработка и исследование пьезопривода на основе многослойных тонкопленочных пьезоактюаторов. 2-я Российская мультиконференция по проблемам управления. Доклады 5-я Научная конференция «Управление и информационные технологии» (УИТ-2008), т.2, СПб.- 2008, с.172-176.
- Никольский А.А. Точные двухканальные следящие электроприводы с пьезокомпенсаторами.- М.: Энергоатомиздат, 1988.- 160 с.
- В.И.Бойков, С.В. Быстров , В.В. Григорьев, Д.Е. Обертов. Пьезопривод на основе тонкопленочных пьезоактюаторов / Приборостроение СПбГУ ИТМО. Том 11. Авионика и управление в технических и информационных системах. СПб: СПбГУ ИТМО, 2009. 98 с
Количество просмотров публикации: Please wait